固定点专题

基于ABAQUS的回弹仿真固定点选择问题
基于ABAQUS的回弹仿真固定点选择问题 问题描述: 在ABAQUS中进行回弹分析时,往往需要限制刚体位移,即限制几何模型的一部分为固定,观察其回弹过程。在Aabqus/Cae中可以创建固定区域集来限制其位移。但是在二次开发的Python脚本中,面对不同的三维模型,其每次需要固定的区域集不一致,无法固定几何模型中目标区域。 解决方法 由于模型由外部导入,面对不同的几何模型,Solidwor
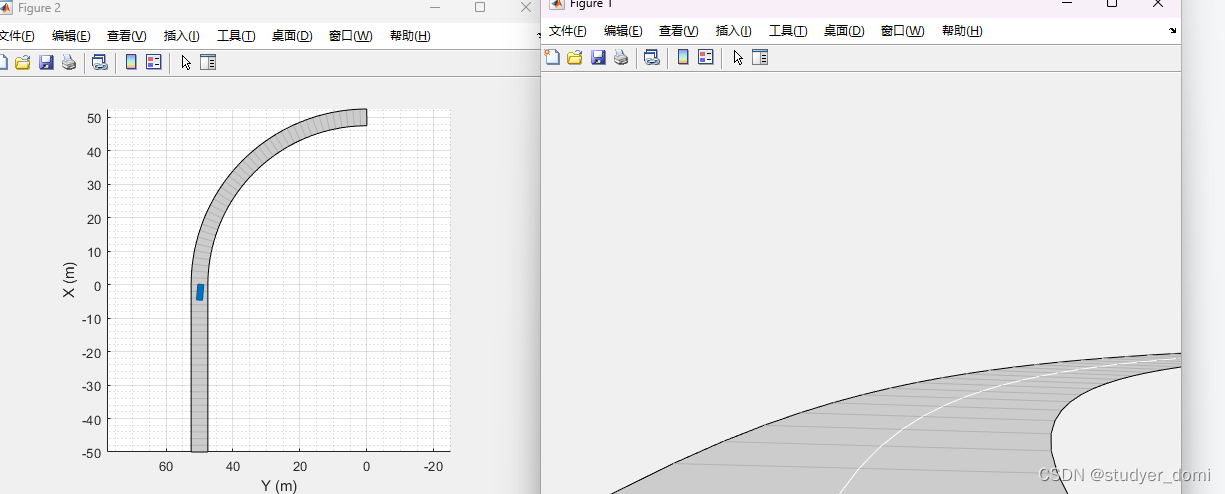
matlab 汽车单车模型固定点跟踪算法
1、内容简介 略 29-可以交流、咨询、答疑 2、内容说明 单车模型固定点跟踪算法 单车模型,固定点跟踪算法,动画演示, 汽车单车模型、转弯动画、固定点跟踪算法、pid控制 3、仿真分析 略 A=[0,5;0,0];B=[0;1]; Q=10*eye(2);R=1; K=lqr(A,B,Q,R) %% plot(xy.signals.values(:,1),xy.signa

让物体绕固定点做圆周运动 让物体到达目的点
考虑了很多思路,但是大部分实际实现与预想的有很大差异,终其原因,是因为每帧的所消耗的时间是不定的,且轨迹离散,所以每帧都可能需要做轨迹的稍微修正(这种修正帧率越低速度越快会导致越明显)。下面的思路是比较简洁和高效的一种方式。 对于3d中的物体运动到目标点或者运动到目标轨迹,都需要先考虑如何让物体到达目标点或者轨迹。这里只讲述如何到达目标轨迹。对于有需要考虑精确的加速度的运动,需要考虑路径积分等复杂