四相专题

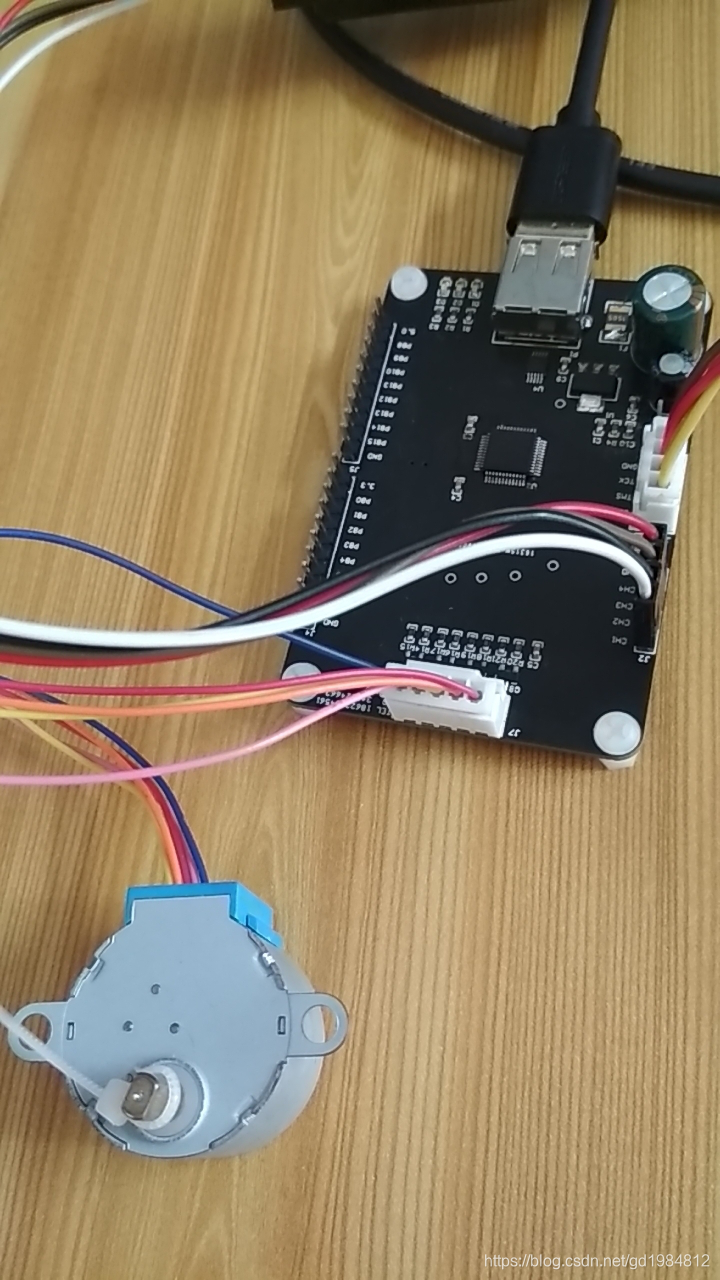
树莓派控制五线四相步进电机
同样是大二时候的坑......就不明白了当初为什么不把代码也给贴上去,现在就贴出代码。 #include<stdio.h>#include<stdlib.h>#include<wiringPi.h> //提供GPIO控制函数#include<unistd.h> //提供sleep()函数void DelayMs(int n){usleep(n*1000);}//使树莓派停止voi
STM32传感器外设集 -- 四相步进电机
目录 前言 motor.h motor.c main.c 一、前言 四项步进电机是我们学习时经常会涉及到的知识,他是由ULN2003作为驱动芯片(因为单片机是3.3V供电,电流较小,不足于给步进电机供电,所以需要ULN2003作为驱动给步进电机供电),这点很多刚开始写步进电机的小伙伴可以还不太了解,以为直接买了一个步进电机就可以驱动了(这个坑),实则必须使用驱动芯片才能愉
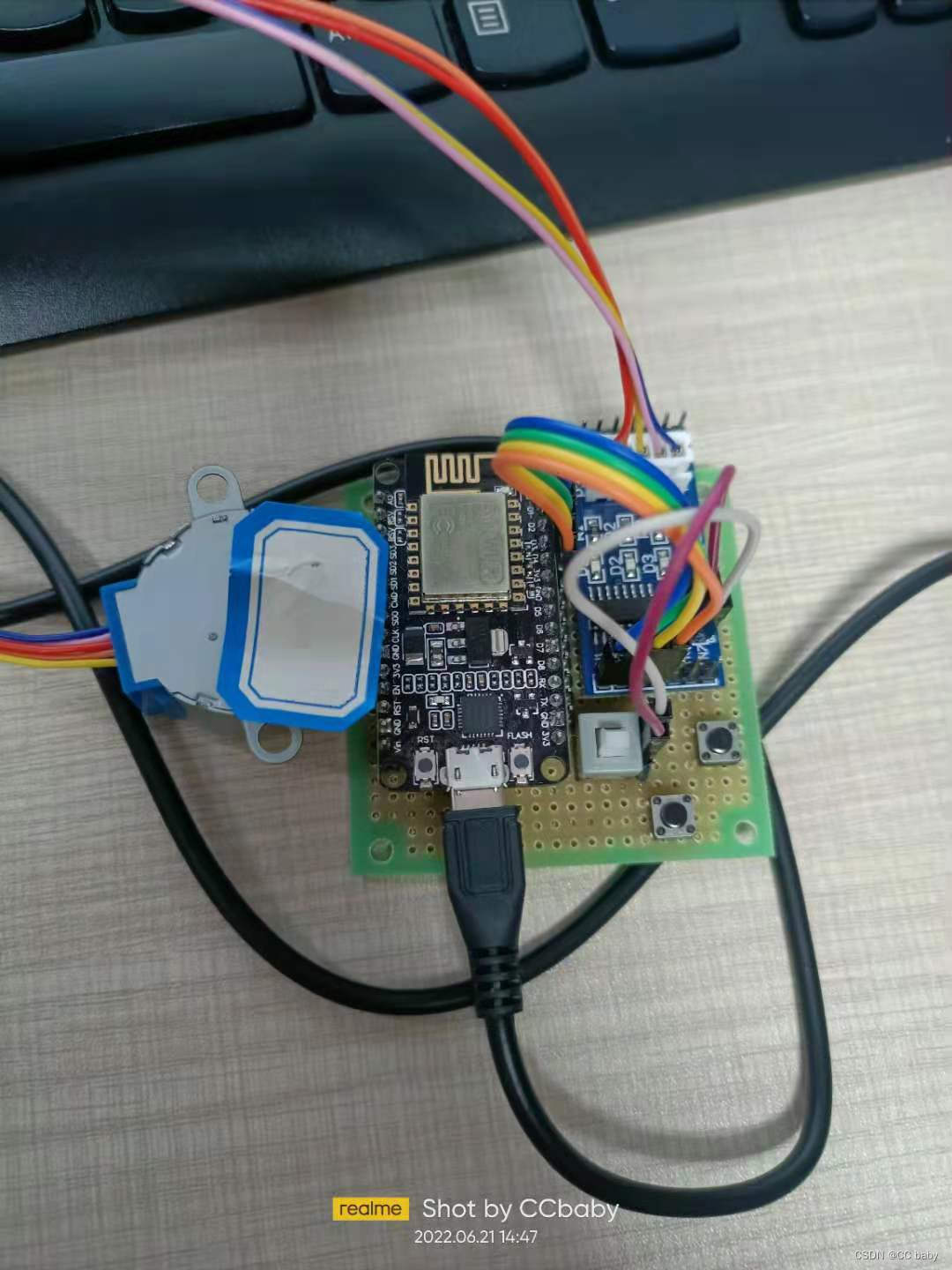
ESP8266驱动五线四相步进电机
一.系统概述 使用ESP8266作为主控,驱动是ULN2003A,驱动五线四相步进电机。 (1)五相步进电机工程图 (2)驱动电路原理图 二.代码部分 #define D1 5#define D2 4#define D3 0#define D4 2#define DSD 5void setup() {// put your setup code here,
步进电机-STM32高级定时器输出正弦波pwm控制四相五线步进电机
前面的文章介绍了单片机控制步进电机四相四拍、四相八拍的方式。用的是持续电平驱动,这种驱动方式电机的噪音大,震动明显,正弦波驱动方式,这种方式能很好的解决噪音和震动问题。前面的文章也介绍了使用定时器产生符合正弦波规律的PWM,下面教大家用正弦波替代持续电平。 这是定时器的配置部分,里面配置了PWM的输出IO管脚,配置了定时器,配置了定时器更新中断。 void TIM_Config(void){
基于单片机的四相步进电机控制设计(电路+程序)
博主福利:100G+电子设计学习资源包! http://mp.weixin.qq.com/mp/homepage?__biz=MzU3OTczMzk5Mg==&hid=7&sn=ad5d5d0f15df84f4a92ebf72f88d4ee8&scene=18#wechat_redirect ----------------------------------------------------

多频外差法之三频四相的理论与实现(matlab)
在提取相位时,如果图像内的周期数仅为一个,则相对相位就是绝对相位,则求得的相位主值就是它的相位值。 实际中,我们投射的光栅并不是一个周期,那么在整个测量的空间中就会求得多个相同的相位主值,这时就需要对包裹的相位值进行展开。 相位包裹又是什么意思呢? 相位包裹的主要原因是相移法解相时使用了反正切函数,用atan2函数,得到四个象限的反正切,所以计算的相位都是在(-pi,pi]之间,也就是被包裹