双差专题

GPS定位单点定位,单差定位,与双差定位转载自u012313072的专栏
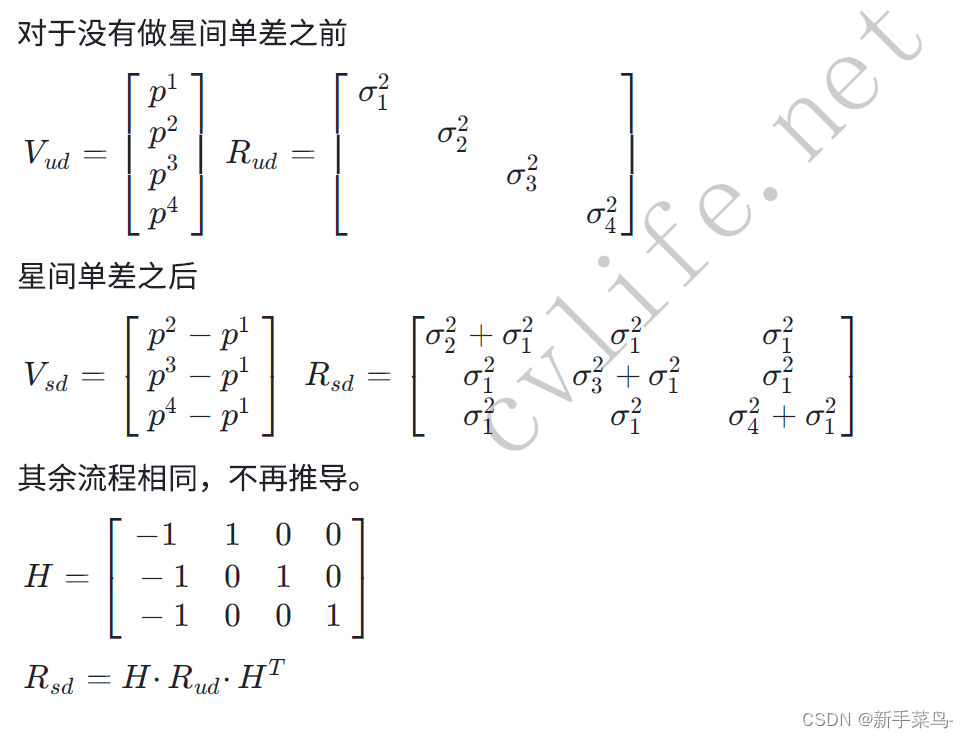
GPS定位单点定位,单差定位,与双差定位。 其中单点定位最为简单,就是用最小二乘算法求解,但是如果加入权矩阵的话,要注意权矩阵的加入方式。 设计矩阵对于单点和单差是相同的,但是对于b矩阵(有的书上叫l矩阵),有点不同。而权矩阵对于单点和单差就区别比较大了,单点时可以设对角阵,一仰角sin值的平方作为权值,这样仰角越大的权值越大,符合规律。但是对于单差,由于需要计算基准站和移动站之间的综合权值,
ddres( ) 组站星双差方程和设计矩阵
1 ddres( )参数介绍 rtklib中进行的单频解算 双差观测值,单差的模糊度 单频点双差 DD (double-differenced) phase/code residuals ------------------------------ x 模糊度 P 方差-协方差阵 sat 共识卫星列表 ns 共识卫星数量 y