区域分割专题
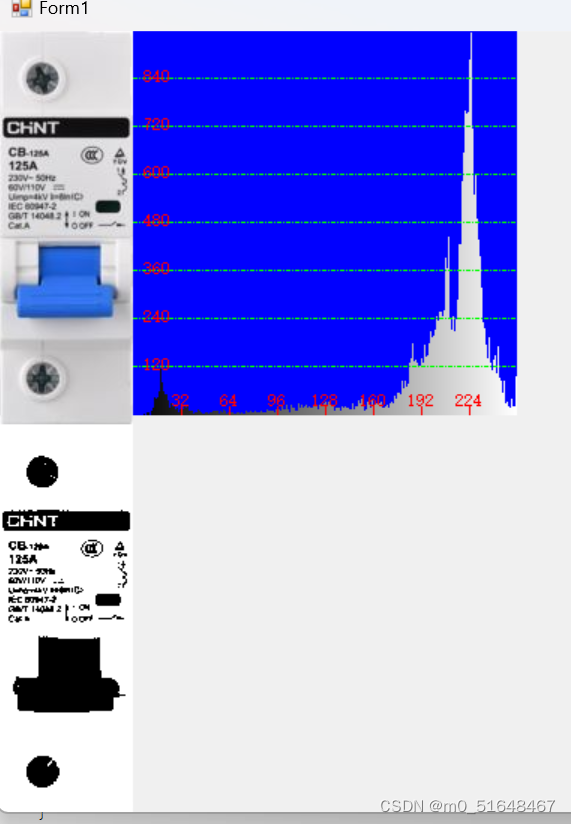
C#图像:1.图像区域分割与提取
(1)创建一个名为SplitImage的窗体的应用程序,将窗体改名为FormSplitImage。 (2)创建一个名为ImageProcessingLibrary的类库程序,为该工程添加名为ImageProcessing的静态类 (3)为ImageProcessing类添加统计直方图的静态函数 (4)在ImageProcessing类中添加二值化处理函数BinaryImage (5)在Sp

灰度图像--图像分割 区域分割之分水岭算法
学习DIP第60天 转载请标明本文出处:http://blog.csdn.net/tonyshengtan ,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:https://github.com/Tony-Tan/DIPpro 更多图像处理机器学习内容请访问最新网站www.face2ai.com #开篇废话 今天已经是第60篇博客了,这六十篇每一篇平均要两天左右,所以,在过
灰度图像--图像分割 区域分割之区域生长
学习DIP第58天 转载请标明本文出处:http://blog.csdn.net/tonyshengtan ,出于尊重文章作者的劳动,转载请标明出处!文章代码已托管,欢迎共同开发:https://github.com/Tony-Tan/DIPpro 更多图像处理机器学习内容请访问最新网站www.face2ai.com #开篇废话 继续说废话,昨天写博客被同事看到了,问我,为什么你每一篇开始都是废

【图像融合】基于matlab GUI区域分割图像融合(融合指标)【含Matlab源码 866期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

基于YOLOv5全系列模型【n/s/m/l/x】开发构建商品商标检测识别系统,融合SegmentAnything(SAM)模型实现自动化商标区域分割抠图
目标检测系列的项目我们有过非常多的项目实践,图像分割也是如此,但是将目标检测产生的结果作为prompt整合输入CV大模型SAM中来实现自动化的ROI区域分割,然后将对应区域抠图存储下来这个倒是没有做过,本文的主要目的就是想要建立:YOLO+SAM的自动化目标检测抠图流程,首先看下实例效果: 简单看下目标检测数据集: YOLOv5是一种快速、准确的目标检测模型,由Glen Dar

【图像处理】人眼区域分割(1)
人眼区域分割(1) 通过尝试计算水平灰度曲线来定位人眼。因为人眼周围灰度变化明显,可以通过灰度曲线图来确定眼睛所在的水平方向坐标。 ##步骤: 灰度化 求水平方向的灰度投影曲线 P ( i ) = ∑ j = 1 n M ( i , j ) P(i)= \sum\limits_{j=1}^{n}M(i,j) P(i)=j=1∑nM(i,j) 图像在内存中庸MxN的矩阵存储,i,

【图像处理】人眼区域分割(2)之梯度积分投影曲线
## 人眼区域分割(2) 在人眼区域分割(1)中,对人脸图片求水平投影曲线(也叫IPF),其反映的是每行像素和的变化曲线,即反应了整体的灰度变化,并没有反映眼睛局部灰度变化明显的特点,所以在曲线中不能唯一而又准确的显示眼睛的位置,若想找到眼睛,则必须要良好的滤波。对于此,采用了其他的投影方法,并通过该曲线来截取人眼区域。 目录: 梯度积分投影分析投影曲线人眼区域分割总结 一、梯度

opencv案例实战:条码区域分割
前言 识别二维码是一个日常生活中常见的应用,而识别之前,需要先分割出条形码的区域来获取条形码。我们可以使用OpenCV便捷的获取条码的区域。 逐步分析 为了了解数据处理的过程,我们逐步分析并显示处理过程 查看图像 在读入时,传入参数cv2.IMREAD_GRAYSCALE可以直接按照灰度形式读入图片。 import cv2import matplotlib.pyplot as plt
4D毫米波雷达——ADCNet 原始雷达数据 目标检测与可行驶区域分割
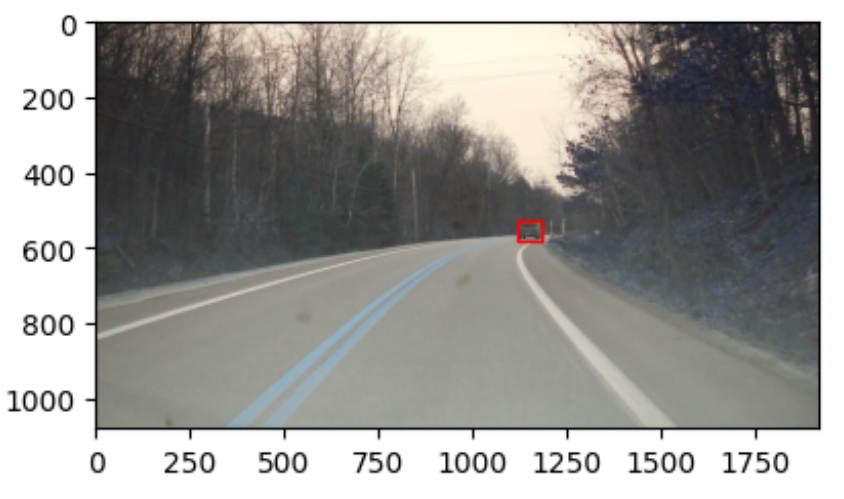
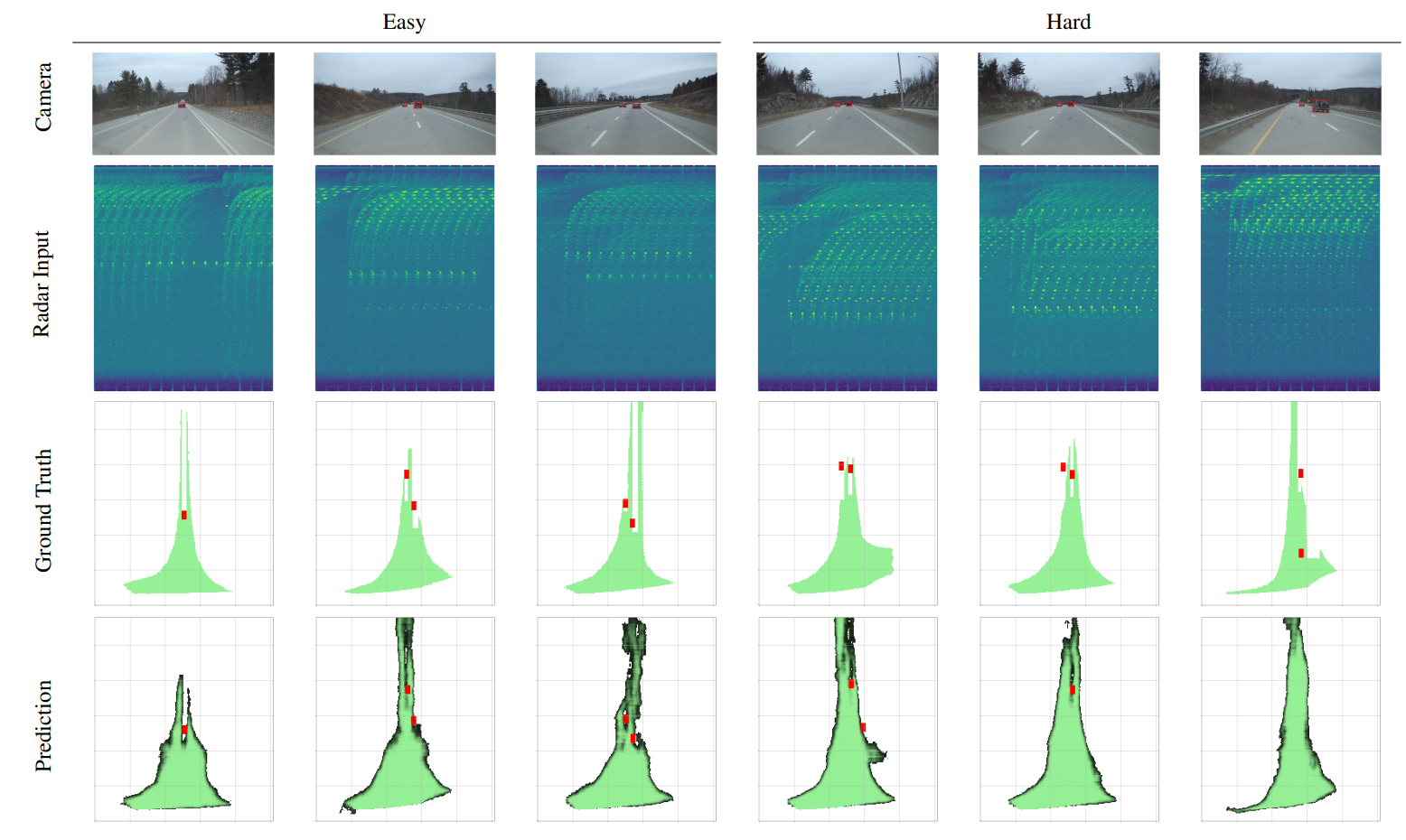
前言 本文介绍使用4D毫米波雷达,基于原始雷达数据,实现目标检测与可行驶区域分割,它是来自2023-12的论文。 会讲解论文整体思路、输入分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:ADCNet: Learning from Raw Radar Data via Distillation 1、模型框架 ADCNet只使用雷达信息,实现车辆检测和可行驶
4D毫米波雷达——FFT-RadNet 目标检测与可行驶区域分割 CVPR2022
前言 本文介绍使用4D毫米波雷达,实现目标检测与可行驶区域分割,它是来自CVPR2022的。 会讲解论文整体思路、输入数据分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:Raw High-Definition Radar for Multi-Task Learning 代码地址:https://github.com/valeoai/RADIal/tree/main
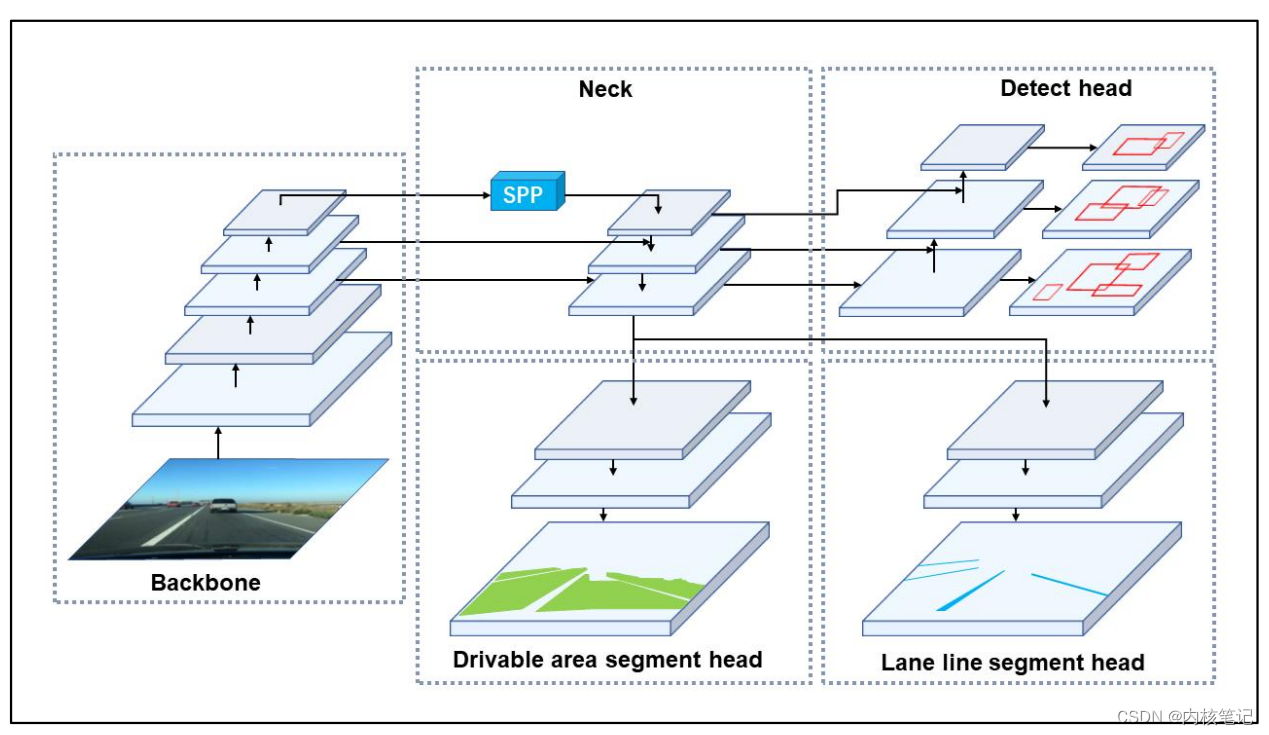
RK3568平台开发系列讲解(AI篇)车辆检测车道线识别可行驶区域分割 模型对比检测结果
🚀返回专栏总目录 文章目录 模型对比检测结果 沉淀、分享、成长,让自己和他人都能有所收获!😄 📢在当今的自动驾驶领域,车辆检测、车道线识别,可行驶区域分割等任务起着至关重要的作用。车辆检测用来检测自身车辆和周围车辆的拥堵程度,车道线识别可以让车辆更好的防止踩线选择更优车道,可行驶区域分割让车辆可以判断在什么范围内可以自由行驶。 模型对比检测结果 交通目标