北达科他专题
北达科他大学( North Dakota State University)cloud_to_map学习
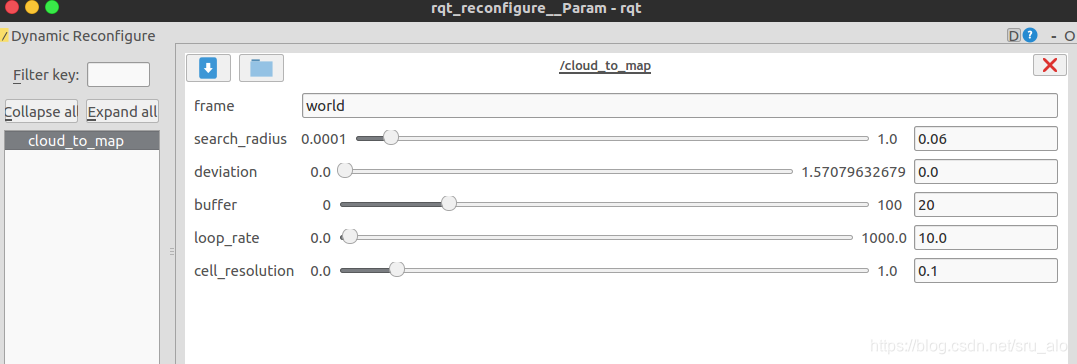
一、ROS 动态参数 cfg文件: #!/usr/bin/env python#ROS动态参数文件PACKAGE = "cloud_to_map"import roslib;roslib.load_manifest(PACKAGE)from dynamic_reconfigure.parameter_generator_catkin import *gen = ParameterGen