功能块专题
运动控制“MC_MoveVelocity“功能块详细应用介绍
1、运动控制单位u/s介绍 运动控制单位[u/s]介绍-CSDN博客文章浏览阅读91次。运动控制很多手册上会写这样的单位,这里的u是英文单词unit的缩写,也就是单位的意思,所以这里的单位不是微米/秒,也不是毫米/秒,这里是一个泛指,当我们的单位选择脉冲时,它就是脉冲/秒,也就是我们说的频率(HZ)。常用脉冲频率 转速 角度 弧度的互相换算大家可以参考下面文章链接:1、转速/频率 /线速度/角速
汇川AM400PLC编码器转速测量功能块(M法测速)
M法测速的原理和相关代码,大家可以参考相关专栏文章,常用链接如下: 1、编码器M法测速仿真 编码器M法测速仿真(Simulink)_mt法测速 simulink-CSDN博客文章浏览阅读2k次。编码器M法和T法测速的详细讲解可以参看下面的文章链接,这里不再赘述,这里主要介绍Simulink里建模仿真,带大家从另一个角度理解编码器测速原理。PLC通过编码器反馈值计算速度的推荐做法(算法解析+ST
博途PLC 面向对象系列之“双通气缸功能块“(SCL代码)
1、面向对象系列之找对象 https://rxxw-control.blog.csdn.net/article/details/136150027https://rxxw-control.blog.csdn.net/article/details/1361500272、博途PLC 面向对象系列之"单通气缸功能块" https://rxxw-control.blog.csdn.net/artic
转动圈数累积功能块(数值积分器)
1、SMART PLC 流量累积功能块请参考下面文章链接: https://rxxw-control.blog.csdn.net/article/details/134542089https://rxxw-control.blog.csdn.net/article/details/1345420892、博途PLC 流量累积功能块 https://rxxw-control.blog.csdn.n
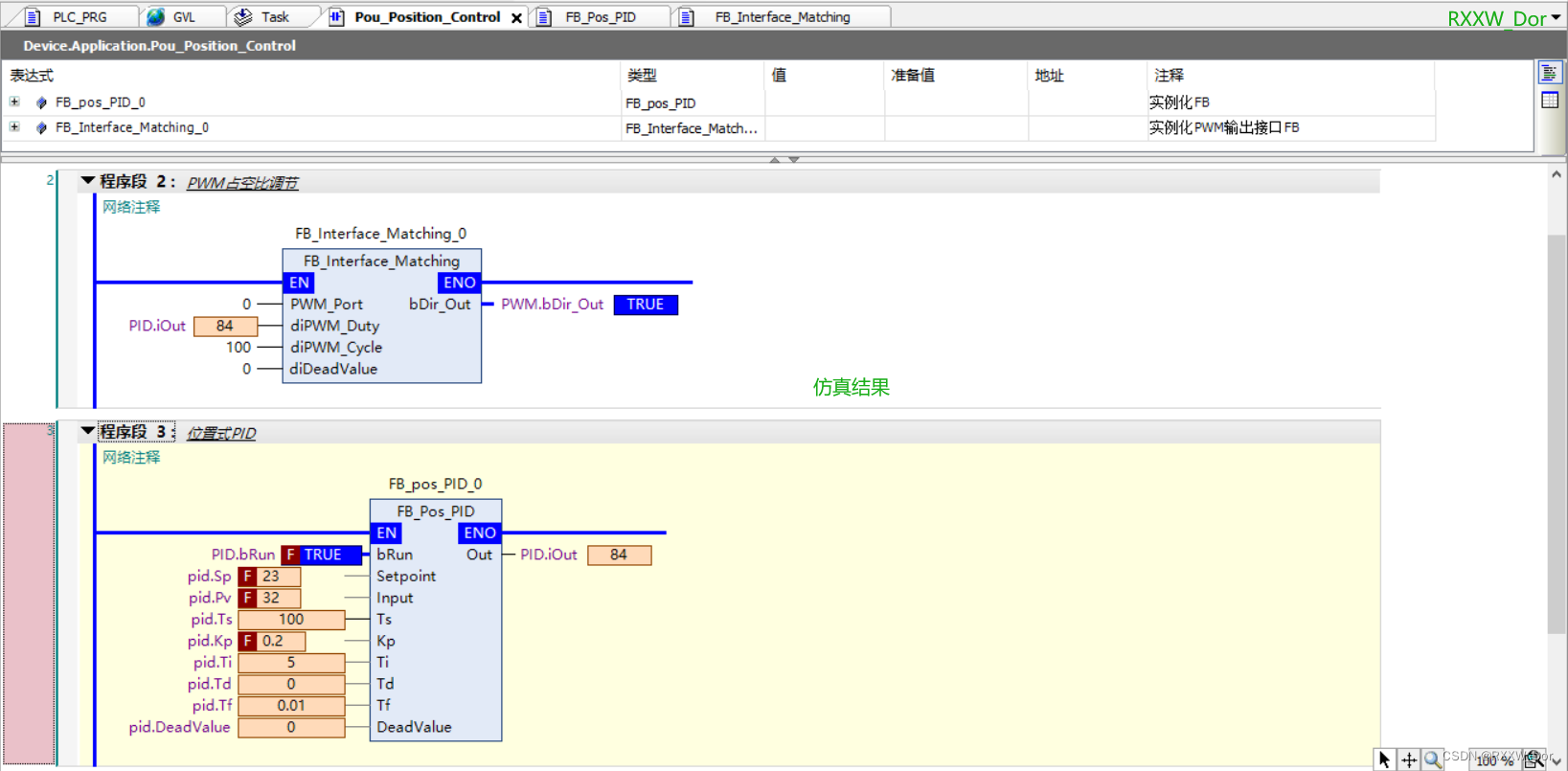
CODESYS如何插入功能块(梯形图调用FB FC)
CODESYS更多内容大家可以查看CODESYS专栏系列文章,这篇博客我们介绍大家在调用FB FC时候的一些基础知识。 1、插入带有EN/ENO的空运算符 2、选择调用FB 3、直径拖拽FB 没有EN/ENO接口 4、运行测试 CODESYS完整位置式PID算法原代码请参考下面文章链接: CODESYS位置式PID完整ST代码
SMART PLC 模拟量批量转换功能块“Multi_ITR“
模拟量输入转换功能块S_ITR详细公式和代码介绍请查看下面文章链接: https://rxxw-control.blog.csdn.net/article/details/121347697https://rxxw-control.blog.csdn.net/article/details/121347697Smart PLC指针和FOR循环组合应用 https://rxxw-control.
气缸功能块(SMART PLC梯形图代码)
有关气缸功能块的更多介绍,可以参考下面链接文章: https://rxxw-control.blog.csdn.net/article/details/125459568https://rxxw-control.blog.csdn.net/article/details/125459568CODESYS平台双通气缸功能块 https://rxxw-control.blog.csdn.net/a
S7-1200PLC脉冲轴位置控制功能块(SCL代码)
S7-1200PLC脉冲轴控制梯形图代码请参考下面链接文章: https://rxxw-control.blog.csdn.net/article/details/127920634https://rxxw-control.blog.csdn.net/article/details/127920634 1、脉冲轴配置 2、机械参数和硬限位设置 3、回原配置 4、轴2配置
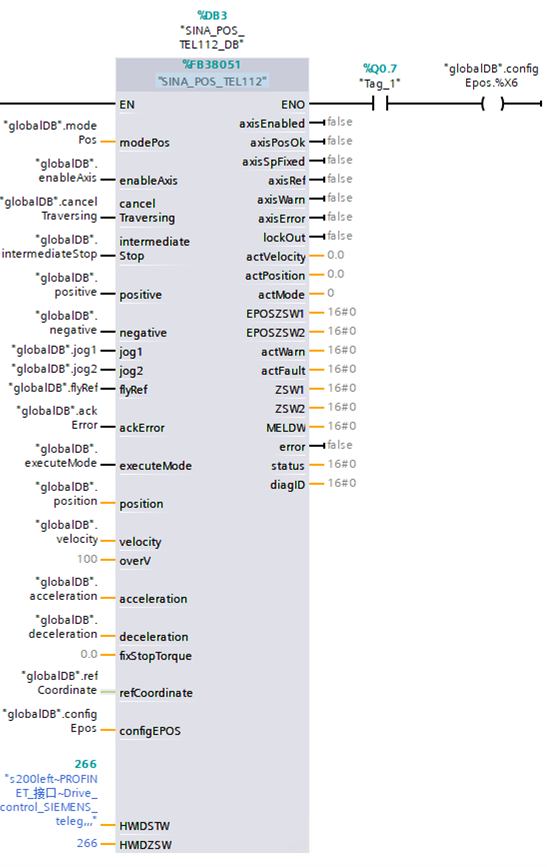
S7-1200/1500(T) 通过功能块FB38051实现 SINAMICS S200 的 EPOS 基本定位控制
SINAMICS S200 PN 是西门子推出的新一代伺服驱动系统。SINAMICS S200 将与 SIMOTICS S-1FL2伺服电机、Motion Connect 350/380 电缆相结合,作为新型单轴 AC/AC 伺服系统,增强了西门子伺服驱动产品的竞争力并扩大了西门子在标准伺服市场的产品组合覆盖范围。它可以实现位置控制、速度控制和扭矩控制。 第三代伺服驱动系统 S

倍福--TwinSAFE功能块的使用
在安全模块的程序设计中,输入变量取反,或者把PLC的变量连接到安全的功能块程序中, 操作流程 1.1. 功能块输出取反 例如修改IN,右击属性,然后可在Single-Channel选项中选择是NO还是NC的输入信号。 1.2. PLC标准变量作为安全程序的输入 1.2.1. 建立两个PLC变量 1.2.2. 安全程序区创建变量
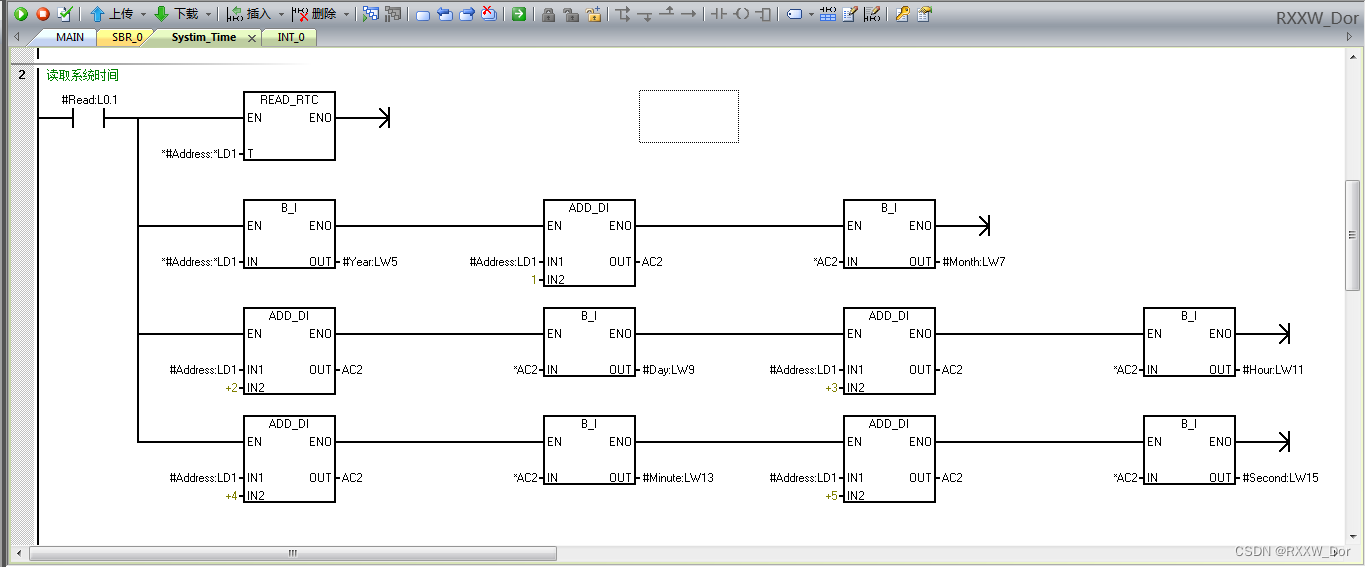
SMART PLC系统时间功能块
有时需要进行和系统时间相关的一些控制应用,所以PLC的系统时间对于此时的工程应用显得尤为重要。下面我们介绍系统时间功能块,这里的功能块我们可以对系统时间进行读取,还可以对系统时间进行修改。 1、系统时间 2、修改系统时间 功能块利用指针和指针运算完成系统时间读取和修改,右侧为功能块的接口定义。 3、SET_RTC指令 4、Read_RTC指令 5、STL代码 SUB
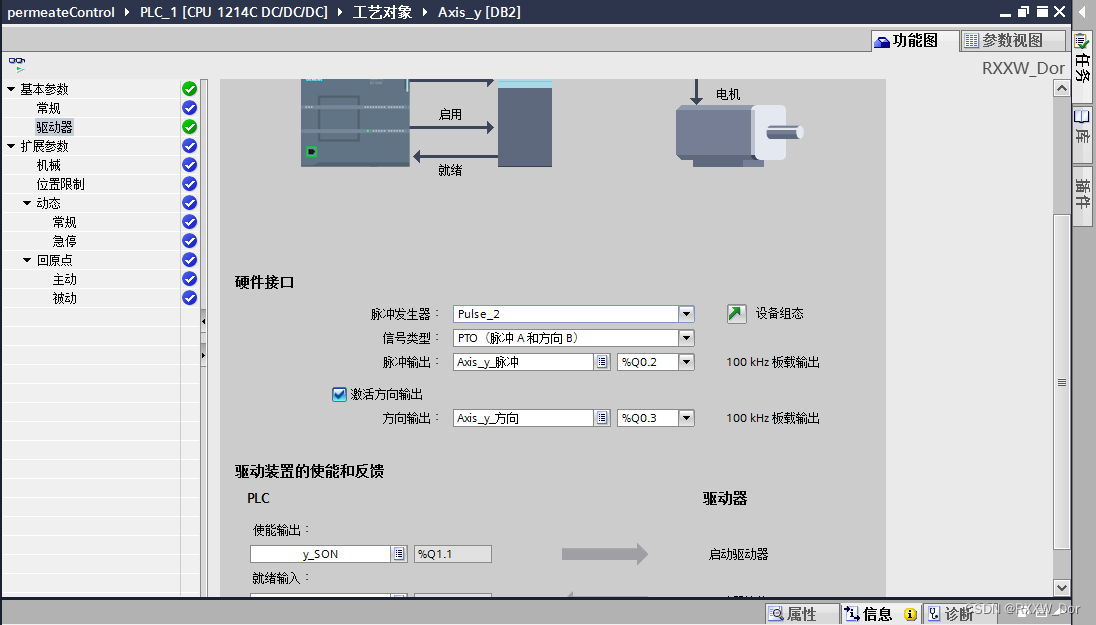
博途1200PLC轴控功能块(脉冲轴)
1200选择晶体管输出的型号,本体支持脉冲发送,利用工艺对象可以组态脉冲轴。利用1200和1500PN总线可以进行总线伺服的控制,具体请参看下面的博客: 博途1200/1500PLC V90 PN通信控制 (FB284功能块)_RXXW_Dor的博客-CSDN博客_fb284功能块先简单说下如何获取FB284,一般有2种方法,Startdrive软件可以操作大部分西门子的驱动器,建议安装调试方便
SMART PLC模拟量上下限报警功能块(梯形图代码)
博途PLC模拟量偏差报警功能块请参考下面的文章链接: 模拟量偏差报警功能块(SCL代码)_RXXW_Dor的博客-CSDN博客文章浏览阅读594次。工业模拟量采集的相关基础知识,可以查看专栏的系列文章,这里不再赘述,常用链接如下:PLC模拟量采集算法数学基础(线性传感器)_plc傳感器數據轉化_RXXW_Dor的博客-CSDN博客。https://rxxw-control.blog.csdn.n

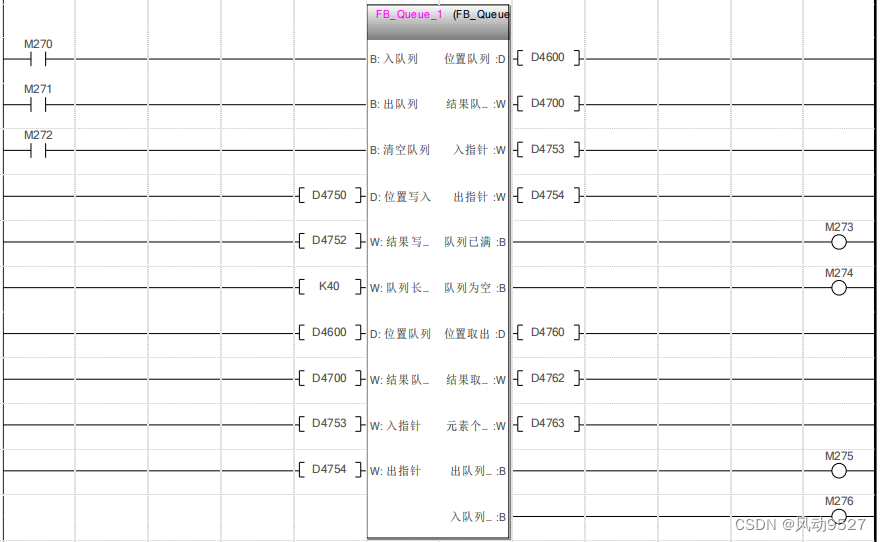
PLC梯形图实现环形队列FB功能块
最近一个三菱FX5U的项目用到队列先入先出的功能,但三菱自带的先入指令SFWR 先出指令SFRD 每次只能传输一个16位数据,而本次需求多个数据绑定在一起先入先出,使用多个链表又比较繁琐,且涉及32位数据拼接。所以自己使用FB实现了一个环形队列如下: 1,输出输出标签如下 2,功能块程序如下: 如上,基本逻辑很简单:建立一个数组,通过入队列指针和出队列指针
PLC模拟量超限报警功能块
模拟量偏差报警功能块请参看下面文章: 模拟量偏差报警功能块(SCL代码)_RXXW_Dor的博客-CSDN博客工业模拟量采集的相关基础知识,可以查看专栏的系列文章,这里不再赘述,常用链接如下:PLC模拟量采集算法数学基础(线性传感器)_plc傳感器數據轉化_RXXW_Dor的博客-CSDN博客。https://blog.csdn.net/m0_46143730/article/details/1
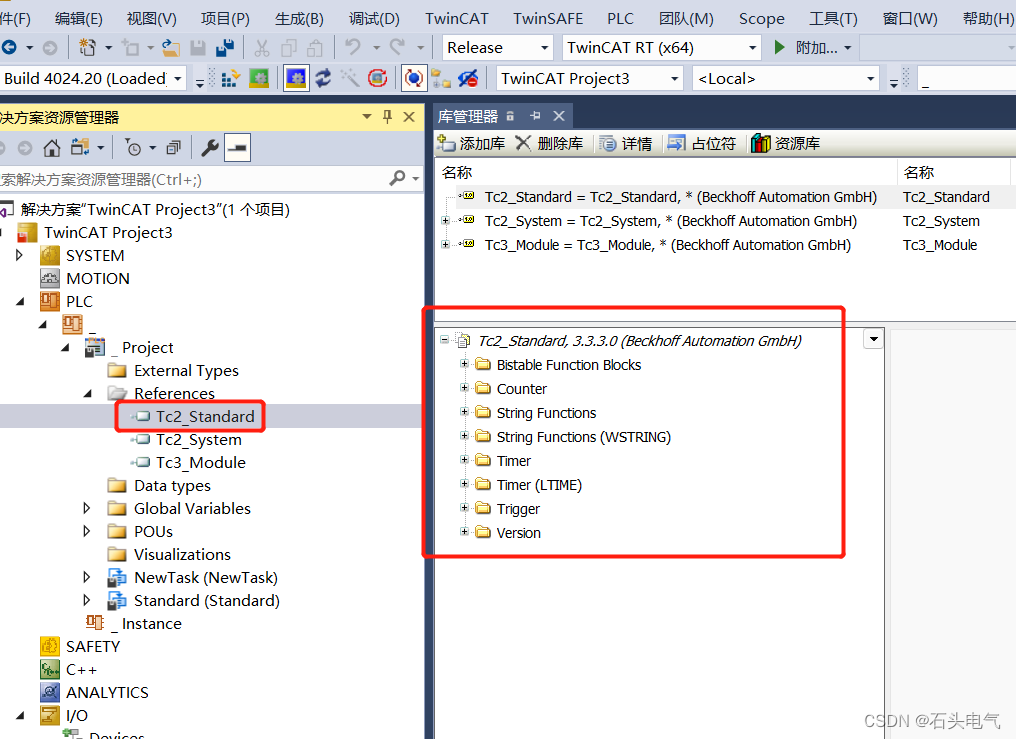
倍福TwinCAT软件Tc2_Standard功能块介绍(1)
目录 Tc2_Standard 1. Bistable Function Blocks (1) RS (2) SR 2. Counter (1) CTD (2) CTU (3) CTUD 3. Timer (1) TOF (2) TON (3) TP 4. Timer(LTIME) (1) LTOF (2) LTON (3) LTP
指数加权平均值滤波Exponential Weighting Method(博途SCL功能块)
在了解指数加权均值滤波算法之前大家可以熟悉下滑动平均值滤波(Lamuda=1.0时,指数加权滤波和滑动平均值滤波算法一模一样),滑动平均值滤波算法的详细介绍,请参看下面文章博客,这里不再赘述。 博途PLC各种平均值滤波算法对比(SCL+梯形图代码)_博途数字滤波梯形图_RXXW_Dor的博客-CSDN博客此文会对比各种滤波算法的优劣,给出具体算法描述和测试代码算术平均值不区分原始数据的质量,特殊
普通开关计米功能块(博途高速计数器应用)
有关计米轮计米的详细方法之前专栏有详细介绍,大部分是基于A/B相计数方式。这篇博客我们介绍单相计数和中断功能完成米数计量,有关高速计数的其它编程应用问题大家可以查看下面相关文章: 博途1200/1500PLC计米轮模块(SCL完整源代码)_RXXW_Dor的博客-CSDN博客计米轮测量线速度和米数的详细原理和算法解读,请参看下面的文章链接,这篇博客直接给出博途SCL的计米轮功能块完整源代码。ht
普通开关计米功能块(博途高速计数器应用)
有关计米轮计米的详细方法之前专栏有详细介绍,大部分是基于A/B相计数方式。这篇博客我们介绍单相计数和中断功能完成米数计量,有关高速计数的其它编程应用问题大家可以查看下面相关文章: 博途1200/1500PLC计米轮模块(SCL完整源代码)_RXXW_Dor的博客-CSDN博客计米轮测量线速度和米数的详细原理和算法解读,请参看下面的文章链接,这篇博客直接给出博途SCL的计米轮功能块完整源代码。ht