力控专题
力控机器人原理及力控制实现
力控机器人原理及力控制实现 力控机器人是一种能够感知力量并具有实时控制能力的机器人系统。它们可以在与人类进行精准协作和合作时,将力传感技术(Force Sensing Technology)和控制算法(Control Algorithm)结合起来,实现高度灵活和精确的操作。 这些机器人通常被用于各种高要求的工作场景中,如精密装配、半导体制造、医疗手术等。通

机器人现有力控技术检索
文章目录 力控技术1 基本柔顺力控1.1 直接力控1.2 间接力控1.2.1 被动和主动柔顺控制1.2.2 混合力位控制1.2.3 阻抗&导纳力控1.2.3.1 原理1.2.3.2 区别和联系1.2.3.3 工程应用 1.2.4 阻抗力控1.2.5 导纳力控 2 先进力控2.1 自适应力控2.2 鲁棒力控2.3 学习力控 3 智能力控3.1 模糊柔顺控制3.2 神经网络柔顺控制
机器人可反向驱动能力与力控架构
反向驱动性是电机传动系统的机械特性,它描述了运动是否可以轻松反转 。特别是,反向驱动能力取决于两个因素:传动运动效率和整体执行器机械阻抗。反向运动中传动装置的低运动效率意味着所施加的外力的大部分被运动反作用力抵消。然而,即使在高运动效率的情况下,也可以通过执行器的高机械阻抗来防止反向运动。由于这些原因,反向驱动能力可能会受到高传动比传动比的影响,高传动比传动比在反向运动中通常在运动学上效率低下,并
力控软件与多台不同品牌的PLC之间如何实现无线通讯?
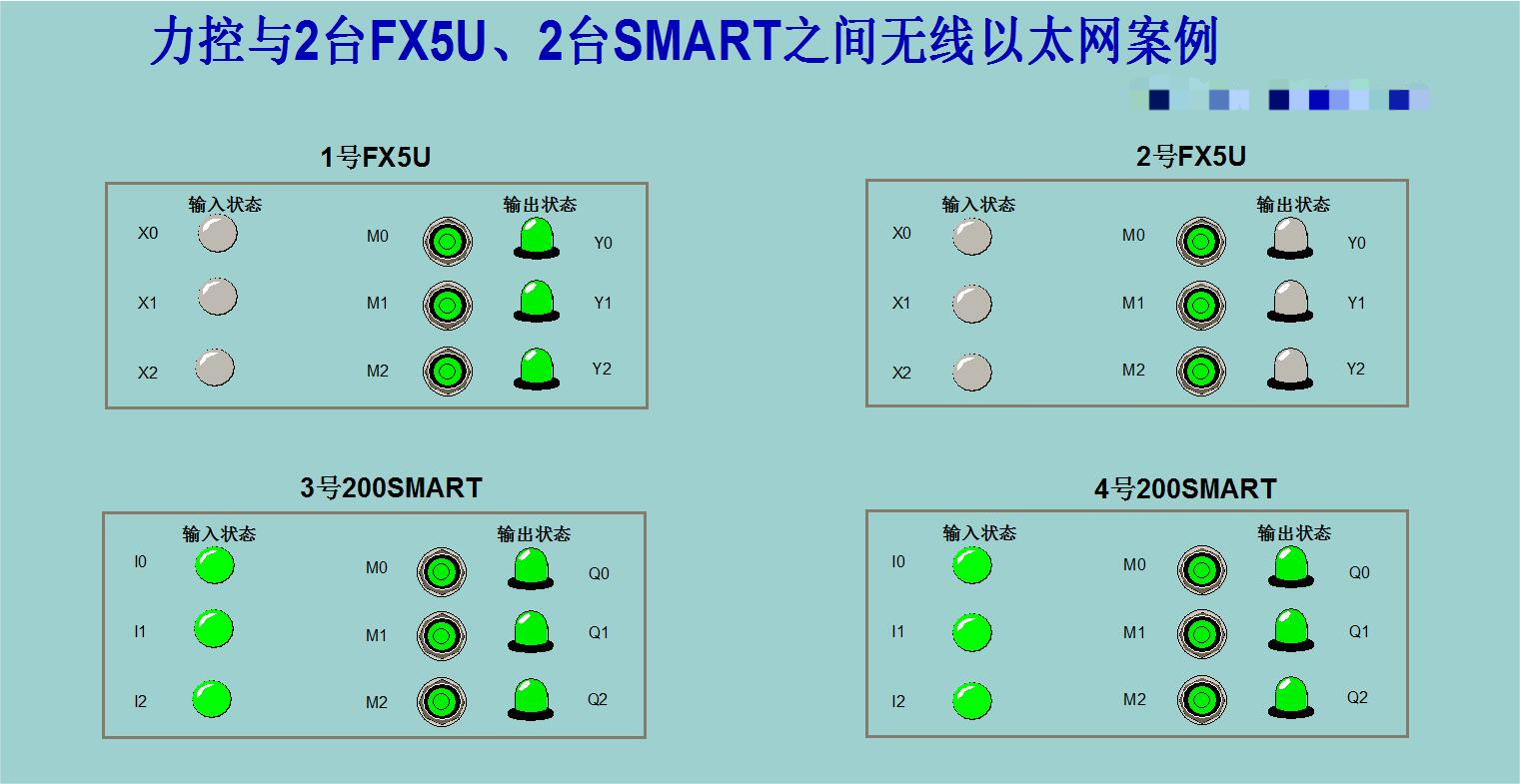
在现代化工厂中,除厂级PLC系统外,还存在很多独立的子系统。比如,各个生产车间的PLC系统、或同一生产车间的不同生产流程的PLC系统。对一个大型工厂,由于生产线的不断改造、新老流程的不断更新,这些PLC系统往往是由不同的制造商提供的。那么在智慧工厂的实现中,常会遇到不同品牌PLC之间需要进行相互通讯的情况。 本方案以力控软件、2台西门子S7-200SMART plc和2台三菱FX5U plc为例

宏集七轴机械臂,以精准力控实现柔性抛光打磨!
(一)行业背景 传统的手工抛光打磨存在劳动强度高、抛光效果不稳定、难以处理复杂形状、安全风险和无法满足高质量要求等痛点。因此,应用工业机器人进行自动化表面精加工的技术随之崛起。 然而,打磨抛光领域一直难以实现全面的自动化,特别是需要进行精细打磨或对打磨后表面有较高要求的工件,如医疗器械设备等。 目前,自动化打磨方案广泛采用了**“被动柔顺"技术**,指在机器人的末端添加柔性装置,以增

力控学习笔记(一)储存罐液位监控示例
一、创建项目 首先通过力控的“工程管理器”指定工程的名称和工作的路径,不同的工程一定要放在不同的路径下。指定工程的名称和路径,启动力控的“工程管理器”: 点击 “新建”,输入名称,设置路径。 新建完成后,显示在列表中,选中点击“开发”打开工程。 二、创建组态界面 1、新建窗口 进入开发环境Draw后,首先需要创建一个新窗口。选择“文件[F]/新建”命令出现“窗口属性”
