偏航专题

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理Arm子系统Enable

异常轨迹检测(识别偏航轨迹+轨迹异常原因识别)
偏航轨迹有两种,一种是整个轨迹全部偏航,另一种是部分轨迹偏航。 基本的思想是将轨迹进行聚类,或者找出两地间频繁的出行模式。 如果一条轨迹不属于任何一个聚类,则认为轨迹偏航 轨迹异常原因有多种,包含事故、交通控制、抗议、庆典、灾难、大型体育运动等 轨迹异常原因识别: 1)根据主要路网形状,将城市分为一个个不相连的区域,并根据两个区域之间行驶的车辆的轨迹,识别两个区域之间的异常联系。

【转】无人机小课堂:无人机的副翼、俯仰、偏航、油门代表什么?
刚刚接触无人机的小伙伴,经常会听到很多英文缩写,如AIL、ELE、RUD、THR等,一不小心就会傻傻分不清。但它们却经常出现在各种遥控器、飞控、调参软件中,因为它们是无人机、航模中最基础的四个通道。 今天《无人机小课堂》就来给大家说说这些英文缩写的含义。 首先给大家科普一下无人机中的“三轴”概念,无人机有横轴、纵轴、立轴三个轴,绕着这三个轴的运动分别是俯仰(Pitch)、横滚(Roll)、偏航
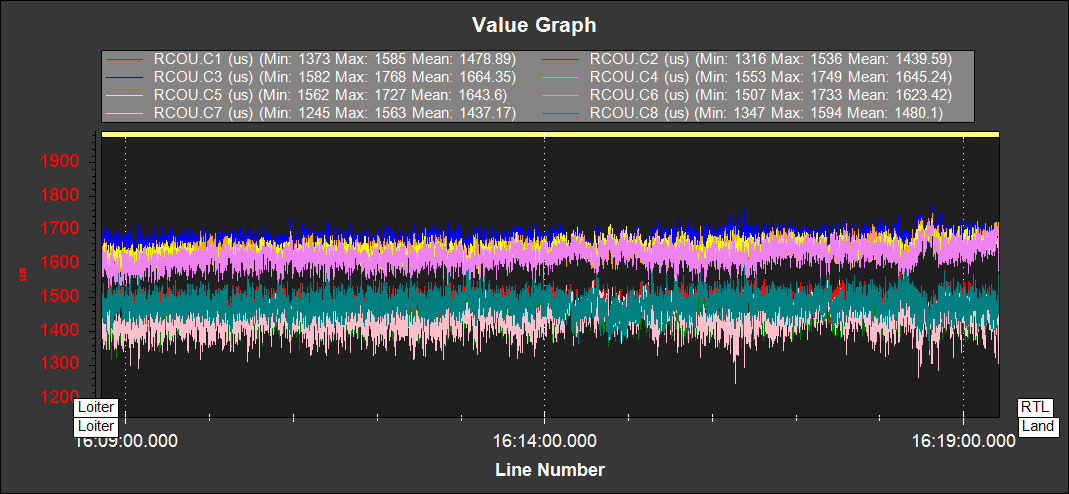
(5)(5.9) 推力损失和偏航不平衡警告
文章目录 前言 1 潜在的推力损失 2 偏航不平衡 3 参数说明 前言 如果你看到推力损失或偏航不平衡的警告,这个页面概述了一些应该做的检查和修改来解决这个问题。在大多数情况下,这些警告是由于错误的硬件选择或设置造成的。 这些警告是为了检测推进系统的硬件故障,如果它们开始出现在一个一直没有警告的飞行器上,则应检查推进系统。警告更有可能发生在较大的有效载荷和强烈/恶心的风中。