传动比专题

空间调制成像光谱仪速度匹配 电机驱动器细分数 步距角 螺杆导程 传动比
空间调制,时空联合调制型高光谱相机需要安装在云台(步进电机+转台)上使用,需要匹配相机帧频和云台转速 云台角速度: ω = ( 1 − a ) ⋅ I F O V ⋅ F P S \omega=(1-a)\cdot IFOV \cdot FPS ω=(1−a)⋅IFOV⋅FPS a为连续两帧之间视场的重合系数。 云台角速度与步进电机速度之间的计算,参考 https://www.docin.c
实用机器人设计(五)-机器人电机功率选择和减速箱传动比设计
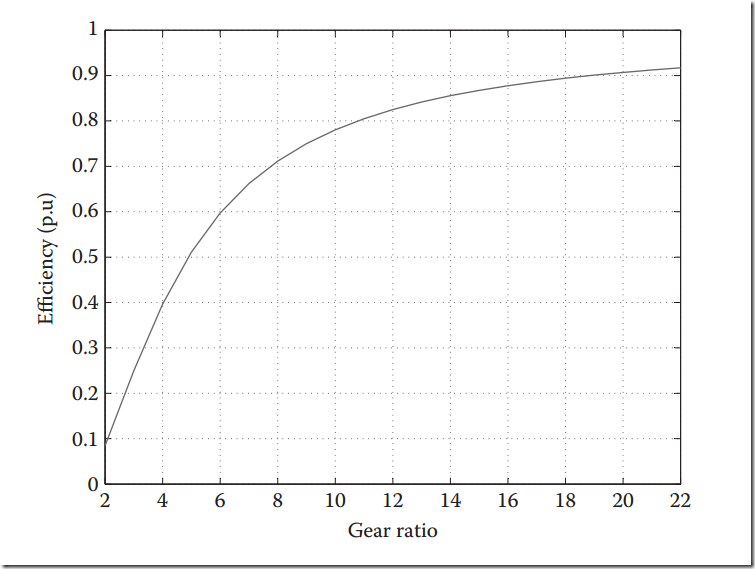
6.1 减速箱传送比 电机小转矩,高转速 6.3 电机的参数 6.4 线性等效摩擦系数B 6.5减速箱传送比的初步研究 求出两个传送比,但用较大的传送比 代码: 图像: 传送比,速度的关系。 转载于:https://www.cnblogs.com/mohuishou-love/p/10228775.html
程序名称:转向设计计算程序 阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动
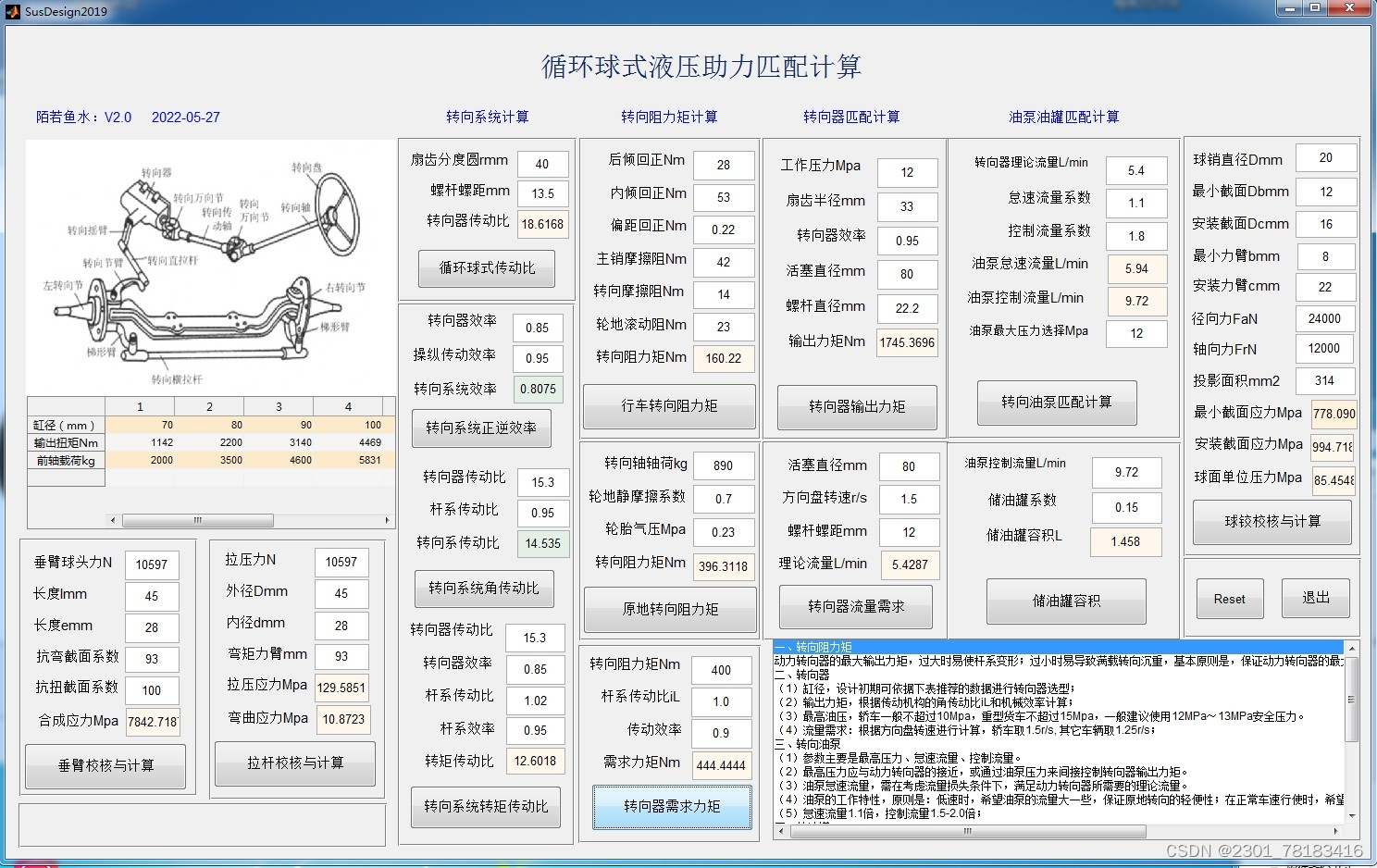
程序名称:转向设计计算程序 开发平台:基于matlab平台 计算内容:阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动,转向梯形,EPS匹配,HPS匹配,齿轮齿条传动比,循环球传动比等计算内容; 适用对象:学习群体、初入行技术人员 特点作用:齿轮齿条EPS和循环球HPS均适用,包含了转向设计中的设计计算,具体请见程序截图 申明提示: 程序主要解决设计计算问题,计算结果均