五线专题

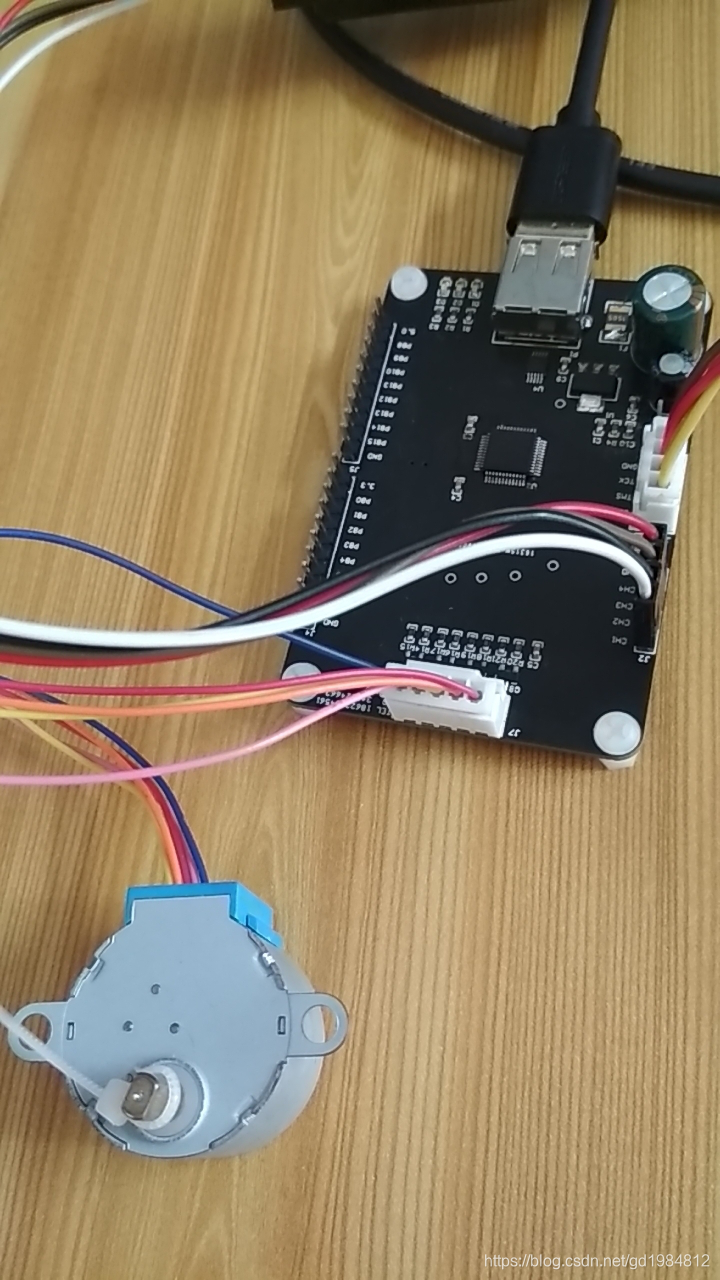
树莓派控制五线四相步进电机
同样是大二时候的坑......就不明白了当初为什么不把代码也给贴上去,现在就贴出代码。 #include<stdio.h>#include<stdlib.h>#include<wiringPi.h> //提供GPIO控制函数#include<unistd.h> //提供sleep()函数void DelayMs(int n){usleep(n*1000);}//使树莓派停止voi
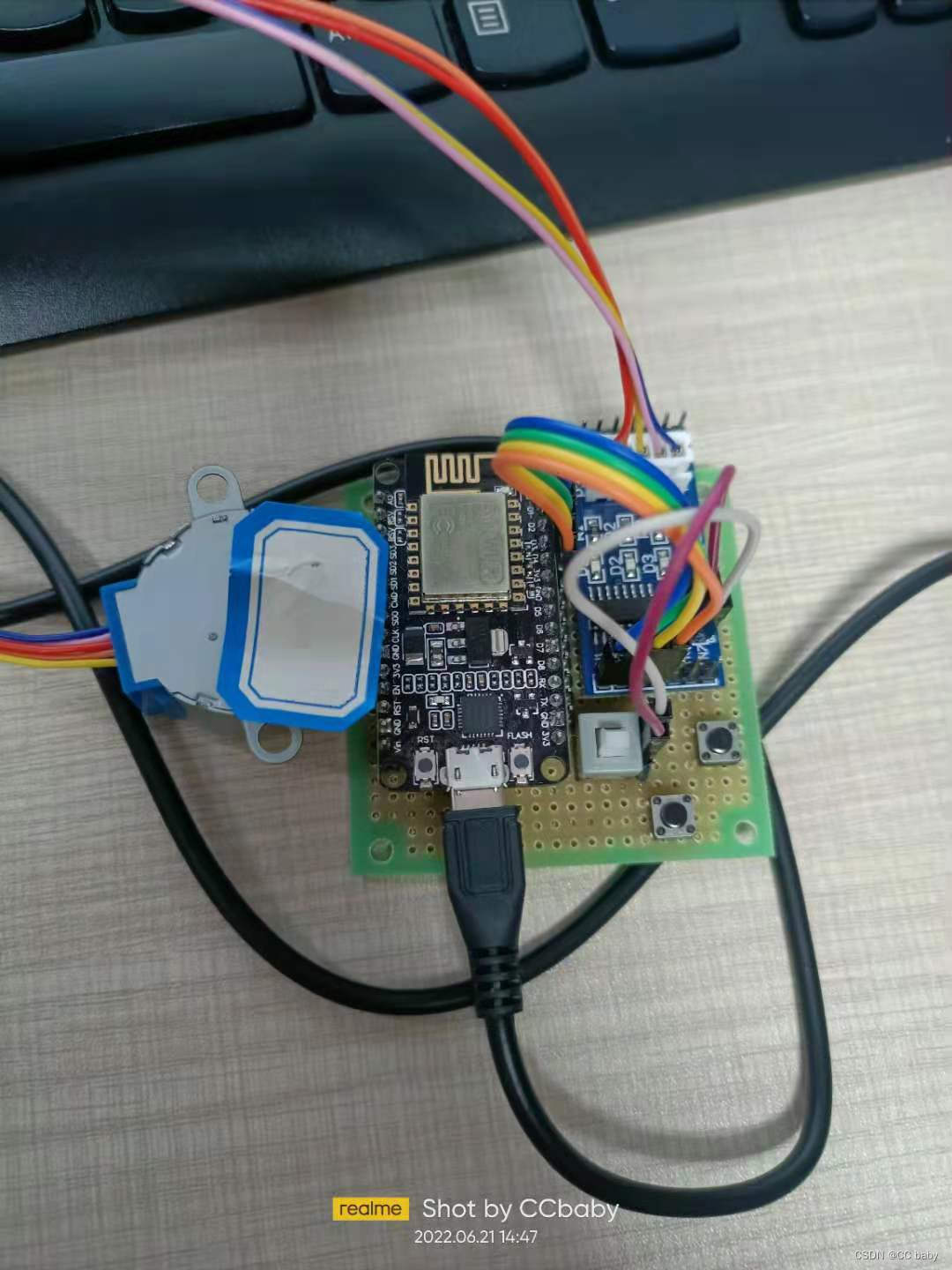
ESP8266驱动五线四相步进电机
一.系统概述 使用ESP8266作为主控,驱动是ULN2003A,驱动五线四相步进电机。 (1)五相步进电机工程图 (2)驱动电路原理图 二.代码部分 #define D1 5#define D2 4#define D3 0#define D4 2#define DSD 5void setup() {// put your setup code here,
步进电机-STM32高级定时器输出正弦波pwm控制四相五线步进电机
前面的文章介绍了单片机控制步进电机四相四拍、四相八拍的方式。用的是持续电平驱动,这种驱动方式电机的噪音大,震动明显,正弦波驱动方式,这种方式能很好的解决噪音和震动问题。前面的文章也介绍了使用定时器产生符合正弦波规律的PWM,下面教大家用正弦波替代持续电平。 这是定时器的配置部分,里面配置了PWM的输出IO管脚,配置了定时器,配置了定时器更新中断。 void TIM_Config(void){