云出专题
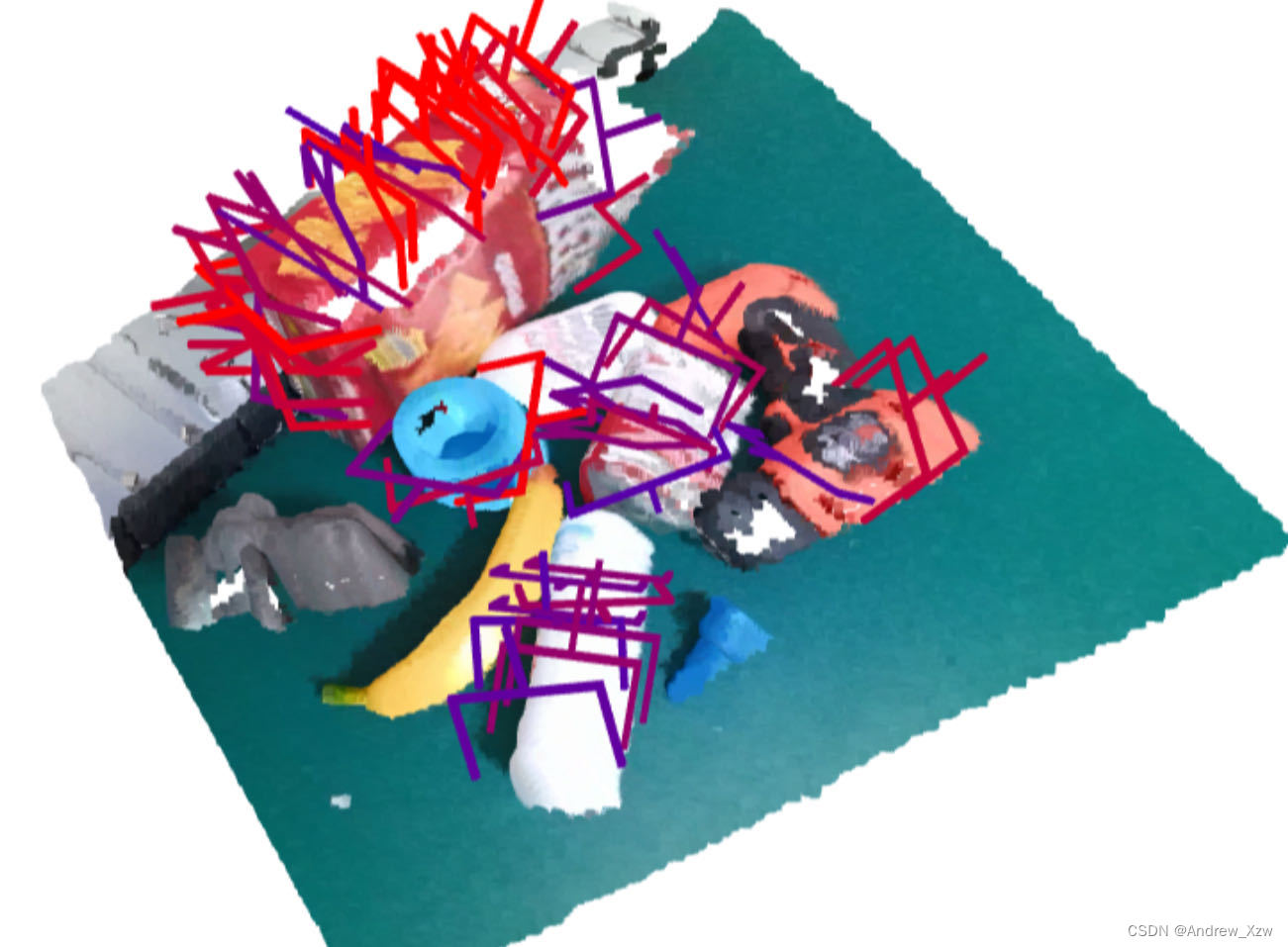
D435相机结合Yolo V8识别出目标物体,并转点云出抓取位姿。
最近项目上需要完成整个识别、定位、到最后的抓取流程。 分享一下,通过使用D435相机并结合Yolo V8识别出目标物体后,抠取出目标物体部分的有效深度图,最后将前景物体部分的RGB D435相机结合Yolo V8识别出目标物体,并转点云出抓取位姿 1、D435相机取流2、D435结合Yolo V8实时检测3、扣取指定物体的深度图3.1 扣取指定物体的mask3.2 根据mask扣取物体有效深度