visionpro专题

VisionOS的未来愿景:苹果VisionPro创业者的愿望清单
随着苹果公司在增强现实(AR)领域的不断探索,VisionPro作为其前沿产品,已经开始展现出改变我们与数字世界互动方式的潜力。作为一名VisionPro创业者,对未来VisionOS的更新充满了期待,并提出了一系列愿望清单,这些愿望不仅代表了个人的需求,也反映了用户社区对苹果AR生态的共同期待。 1. iPhone上的VisionApp 首先,用户希望能够在iPhone上通过一个专门的V
VisionPro的应用和入门教程
第1章 关于VisionPro 1.1 康耐视的核心技术 1. 先进的视觉系统 康耐视的视觉系统结合了高性能的图像传感器、复杂的算法和强大的计算能力,能够实时捕捉、分析和处理高分辨率图像。其视觉系统包括固定式和手持式两种,适用于各种工业环境。无论是精密电子元件的检测,还是大规模生产线的质量控制,康耐视的视觉系统都能提供精准的解决方案。 2. 深度学习与人工智能 康耐视引入了深度学习和人工

康耐视visionpro-CogOCRMaxTool操作操作工具详细说明
CogOCRMaxTool功能说明: 字符识别工具 CogOCRMaxTool操作说明: 1.打开工具栏,双击或点击鼠标拖拽添加CogOCRMaxTool工具 ②.添加输入图像,右键“链接到”或以连线拖拽的方式选择相应输入图像。 ③.将屏幕上的检测区域拖拉到需要检测的字符区域,每次只能检测一行字符,检测区域大小尽量与字符大小相近,可减少干扰。 ④.选择“Font Training”设置栏;
visionpro_对比工具_CogPatInspectTool
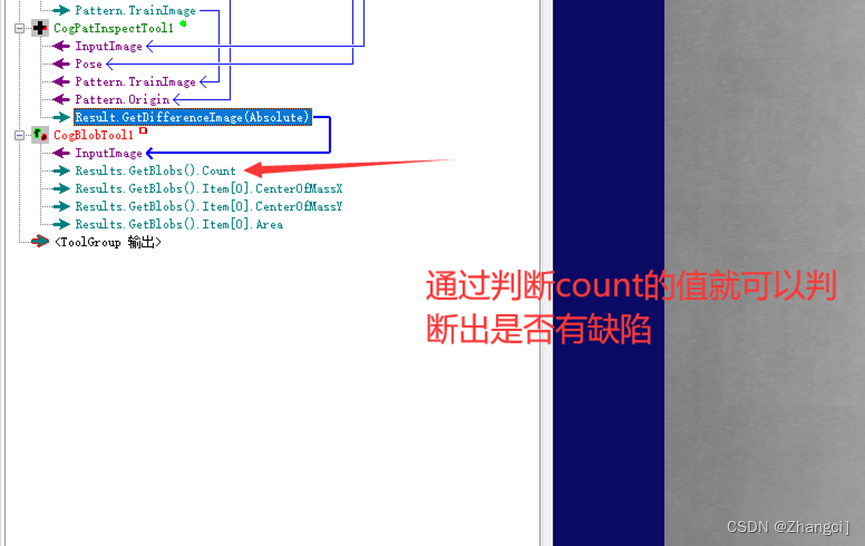
CogPatInspectTool CogPatInspectTool工具使用PatMax检测缺陷(缺陷被定义为运行期间图像中超出正常预期的图像差别的任何变化),缺陷可能是物体遗失(阻塞)或者多余(杂乱), 原理是通过PMAlign工具实现,用训练图片和当前输入图片进行对比从而得到缺陷 基本步骤: 训练基准图案训练检查图案设置运行期间参数运行PatInspect从PatInspect中萃取
康耐视visionpro-CogCreateLinePerpendicularTool操作操作工具详细说明
CogCreateLinePerpendicularTool]功能说明: 创建点到线的垂线 CogCreateLinePerpendicularTool操作说明: ①.打开工具栏,双击或点击扇标拖拽添加CogCreateLinePerpendicularTool ②.添加输入源:右键“链接到”或以连线拖 拽的方式选择相应输入源。 X:输入X点 Y:输入Y点 Line:输入线 ③.运行工具后,输
康耐视visionpro-CogDistancePointLineTool操作工具详细说明
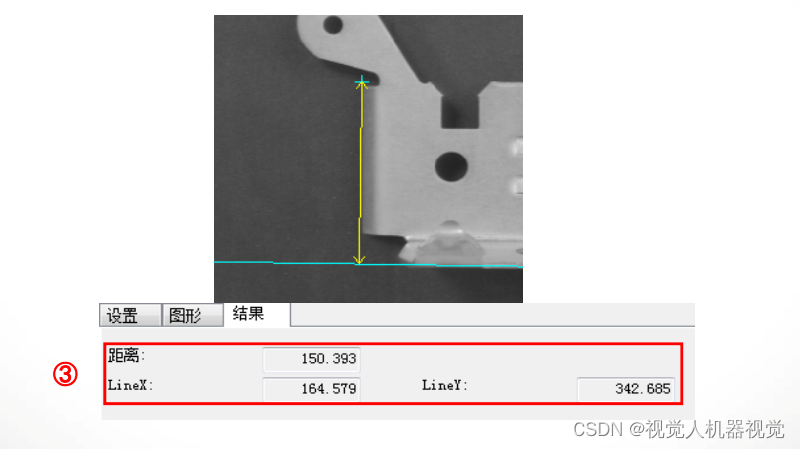
◆CogDistancePointLineTool:功能说明: 测量点到线的距离 备注:在“Geometry-Measurement”选项中的所有工具都是测量尺寸或角度工具,包括测量线与线的角度、点与线的距离、圆与圆的距离等测量工具,工具使用的方法相似。 ①.打开工具栏,双击或点击鼠标拖拽添加CogDistancePointLineTool.工具 ②.添加输入图像,点击鼠标右键“链接到”或以连
康耐视visionpro-CogFindLineTool操作工具详细说明
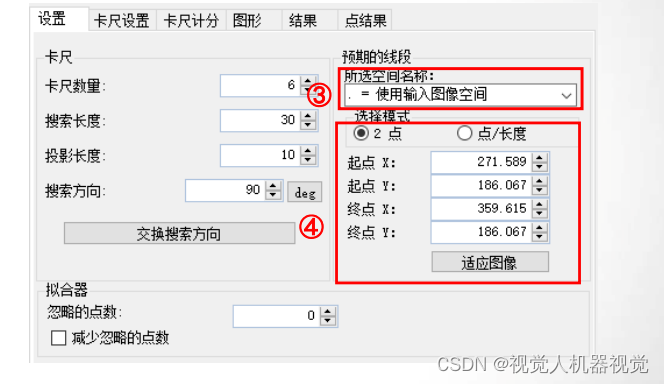
◆CogFindeLineTool功能说明: 检测图像的直线边缘,实现边缘的定位、测量。 ◆CogFindeLineTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogFindLineTool工具 ②.添加输入图像,点击鼠标右键“链接到”选择输入图像或以连线拖拽的方式选择相应输入图像 ③.所选空间名称:选择不同的空间名称,预期线段的位置会自动转换到新的坐标系位置。默认“使用输入图像
康耐视visionpro-CogFindCircleTool操作工具详细说明
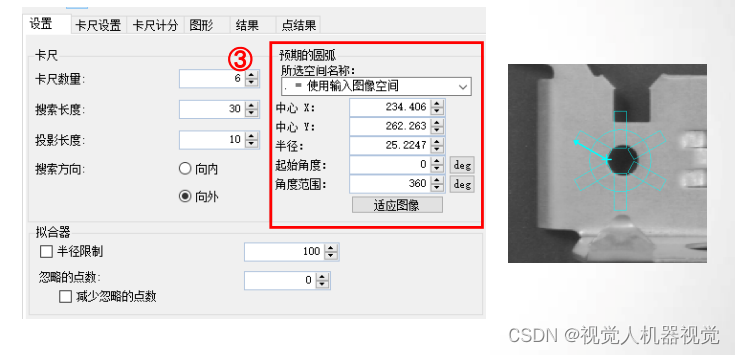
◆CogFindCircleTool]功能说明: 通过用多个卡尺找到多个点来拟合所要找的圆 ◆CogFindCircleTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogFindCircleTool工具 ②.添加输入图像,右键“链接到”或以连线拖拽的方式选择相应输入源 ③预期的圆弧:设置预期圆弧的中心点、半径、起始角度及角度范围。也可以在屏幕上手动移动或拖拉图形实现预期圆弧中心
康耐视visionpro-CogBlobTool工具操作详细说明
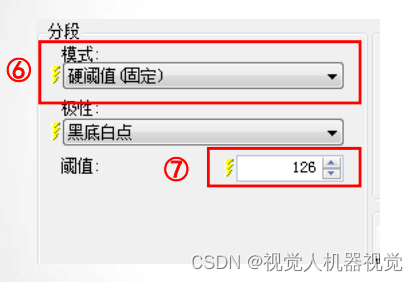
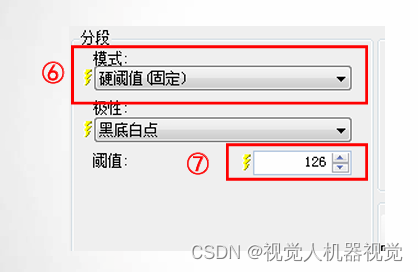
CogBlobTool功能说明: 通过设置灰度值提取感兴趣区域,并分析所提取区域的面积、长宽等参数。 Cog BlobTool操作说明: .打开工具栏,双击或点击鼠标拖拽添加CogBlobTool工具 ②.添加输入图像:单击鼠标右键“链接到”或以连线拖拽的方式选择相应输入源 ③.极性: “白底黑点”提取的区域为白色背景中的黑色区域; “黑底白点”提取的区域为黑色背景中的白色区域; ④.最小面积
康耐视visionpro-CogDataAnalyTool操工具详细说明
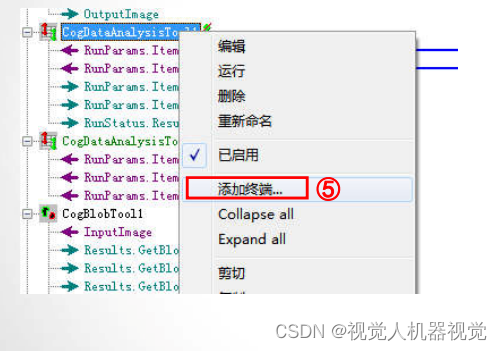
CogDataAnalyTool功能: 数据分析工具,统计数据的平均值、标准差、最大值及最小值等。 CogDataAnalyTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogDataAnalyTool ②.添加通道:根据需要添加多个输入通道,可同时统计多个输入数据。 ③.打开结果栏,点击运行可获取数据结果 ④. 数据结果:可得到均值、标准差、最小值和最大值。(若图像未标定,所有结
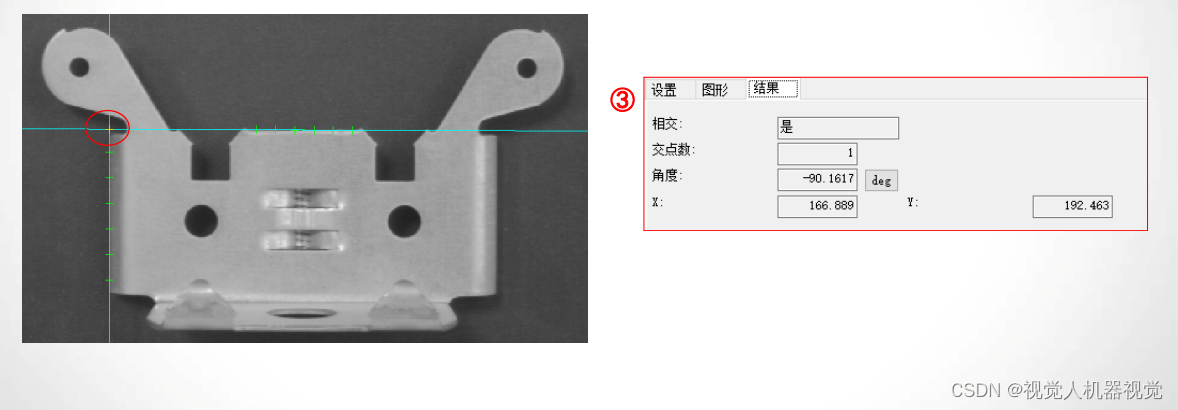
康耐视visionpro-CogIntersectLineLineTool工具详细说明
CogIntersectLineLineTool功能说明: 创建两条线的交点 备注:在“Geometry-Intersection”选项中的所有工具都是创建两个图形的交点工具,其中包括圆与圆的交点、 线与圆的交点、线与线的交点、线与圆的交点等,工具使用的方法相似。 ①.打开工具栏,双击或点击鼠标拖拽添加CogIntersectLineLineTool工具 ②.添加输入图像,点击鼠标右键“链接到
康耐视visionpro-CogBlobTool工具详细说明
CogBlobTool功能说明: 通过设置灰度值提取感兴趣区域,并分析所提取区域的面积、长宽等参数。 CogBlobTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogBlobTool工具 ②.添加输入图像:单击鼠标右键“链接到”或以连线拖拽的方式选择相应输入源 ③.极性:“白底黑点”提取的区域为白色背景中的黑色区域;“黑底白点”提取的区域为黑色背景中的白色区域; ④.最小面积:设
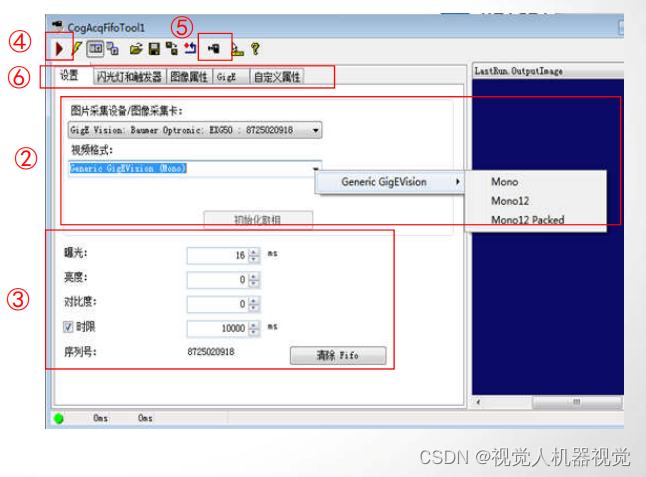
康耐视visionpro-CogAcqFifoTool工具详细说明
CogAcqFifoTool操作说明: ① 打开工具栏,双击或点击鼠标拖拽 添加CogAcqFifoTool ②.从图片采集设备/图像采集卡列表里选择对应的相机,视频格式选择图像格式。 Mono表示黑白图像,RGB表示彩色相机。点击初始化取相初始化相机。 ③. 设置相机的曝光时间、亮度及对比度等参数。“时限”即取图像采集超时的时限。 ④.点击运行,相机采集图像 ⑤.点击 Live Displa
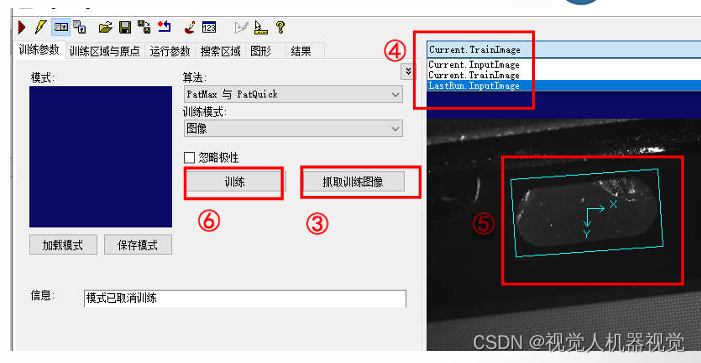
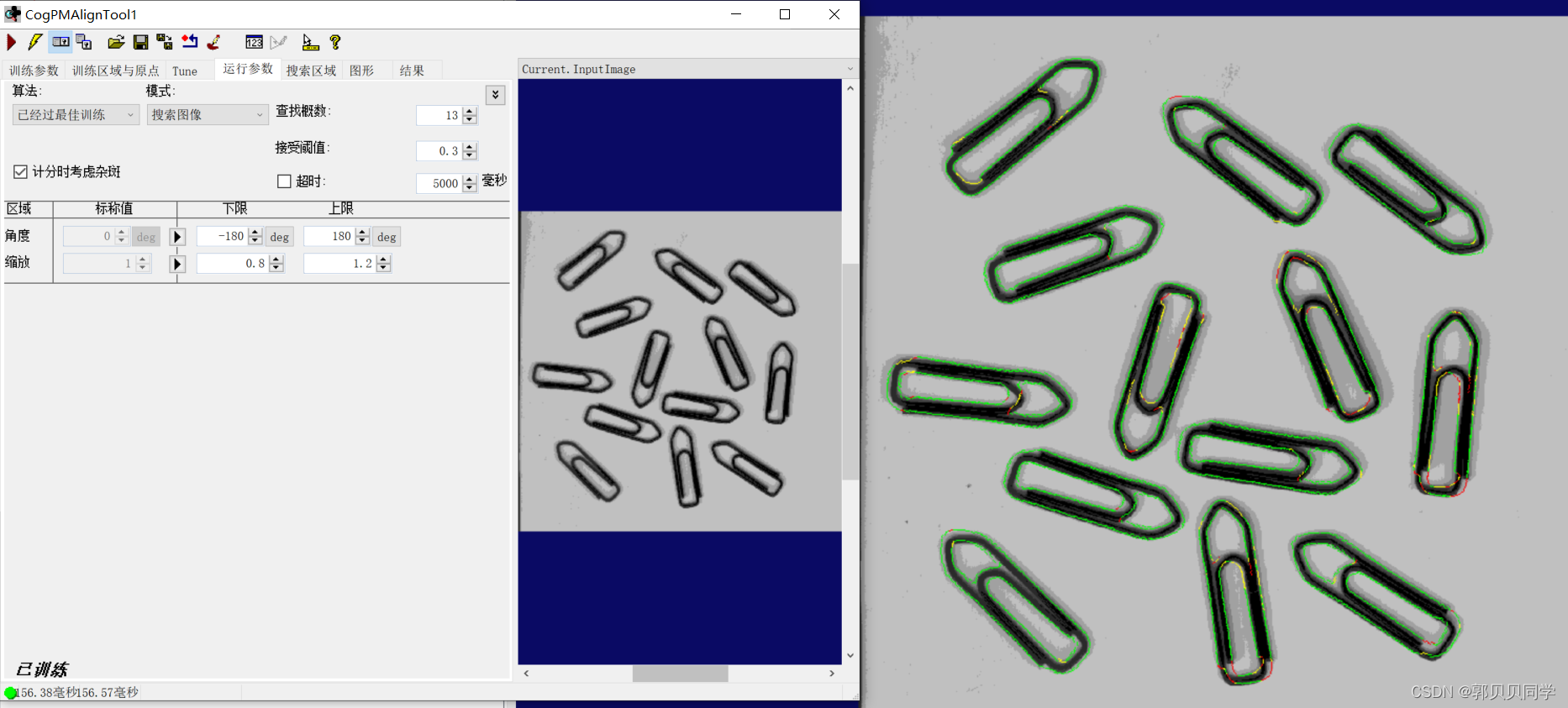
康耐视visionpro-CogPMAlignTool工具详细说明
CogPMAlignTool功能: 匹配产品形状,实现产品定位。 CogPMAlignTool操作说明: 1.打开工具栏,双击或点击鼠标拖拽添加CogPMAlignTool工具 ②.添加输入图像:右键“链接到”或以连线拖拽的方式选择相应输入图像 ③.点击“抓取训练图像”按钮获取训练图像 ④.在图像下拉列表中,选择“Current.TrainImage”训练图像 ⑤.拖动图像上的训练图形ROI,

VisionPro 9.0 64位下载地址
VisionPro 9.0 64位下载地址: http://www.cognex.com/support/downloads/ns/3/16/140/VisionPro_9_0_64-bit.zip VisionPro 9.0 32位下载地址: http://www.cognex.com/support/downloads/ns/3/16/140/VisionPro_9_0_32-bit.z
对VisionPro的认识,CogPMAlingTool模板匹配工具练习
什么是VisionPro? 在认识VisionPro之前我们需要先熟悉一下图片的各种格式 这里我们可以参考来自githubcurry博主的文章 图片各种格式的区别以及计算机如何存储图片 VisionPro 是由世界领先的机器视觉公司 Cognex 开发的一款专业机器视觉软件。它提供了强大的图像处理和分析功能,用于实现自动化生产线上的视觉检测、定位和测量等应用。VisionPro 被广泛应用

C#与VisionPro联合开发——串口通信
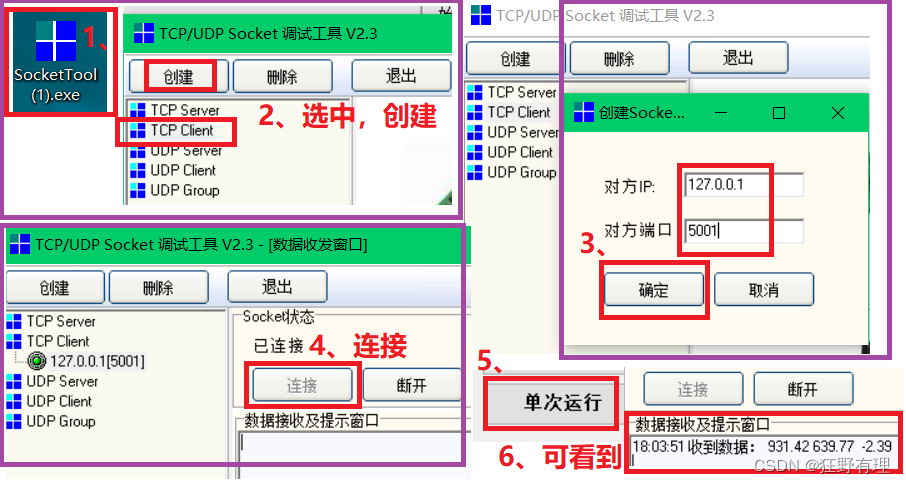
串口通信 串口通信是一种常见的数据传输方式,通过串行接口(串口)将数据以串行比特流的形式进行传输。在计算机和外部设备之间,串口通信通常是通过串行通信标准(如RS-232)来实现的。串口通信可以用于连接各种设备,如打印机、传感器、单片机等。 在串口通信中,数据按照位的顺序依次传输,一个字节(8位)的数据通常包括起始位、数据位、校验位和停止位。串口通信的优点包括连接简单、传输距离较远、可靠性高等特

C#与VisionPro联合开发——跳转页面
1、跳转页面并打开相机 From1 所有代码展示 using System;using System.IO;using System.Windows.Forms;//引入VisionPro命名空间using Cognex.VisionPro;namespace ConnectCamera {public partial class Form1 : Form {public Form1

C#与VisionPro联合开发——INI存储和CSV存储
1、INI存储 INI 文件是一种简单的文本文件格式,通常用于在 Windows 环境中存储配置数据。INI 文件格式由一系列节(section)和键值对(key-value pairs)组成,用于表示应用程序的配置信息。一个典型的 INI 文件包含多个节,每个节可以包含多个键值对。每个键值对由一个键(key)和一个对应的值(value)组成,它们之间用等号或冒号分隔。INI 文件通常具有 .i
VisionPro工具
VisionPro工具 CogBlobTool:斑点检测工具。脏污,亮度值不够的某一块区域,可以检测对象的尺寸,形状,方向。 CogCaliperTool:卡尺工具,查找边缘的工具,一切测量工具的基础。 CogPMAlignTool:用于训练模版,根据训练模版识别出跟模版相似的。 CogFixtureTool:用于建立自身特征的空间坐标系,通常与PMAlignTool工具一起使用。需要提

VisionPro脚本教程第一节 初识脚本
Visionpro共支持两种脚本语言:VB和C#,博主今天讲的是C#。大家不要把这个玩意想的太神秘,首先介绍作业的里面采集图像的脚本,如下打开配置作业属性 然后编辑脚本选择C#,这个里面的脚本很少用,具体就是取图的时候可以进行相关的操作,比如我想用基恩士的3D相机,可以在这个里面引用DLL文件,然后初始化相机,取图在传出去就可以了,我会在后续专门发一个章节讲解。 第二个Job的脚本:
visionpro工业相机 IP 配置步骤
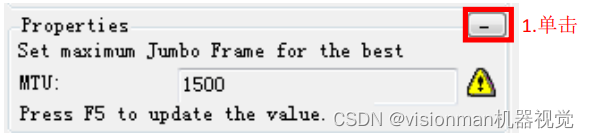
机器视觉康耐视智能相机Insight-毛边毛刺检测 设置步骤 tep1:配置相机 IP。 单击上图中①位置处的“192.168.10.100”,显示如下界面: 将①处相机 IP 地址“192.168.10.100”改成“192.168.1.100”,单击“Update Camera Address”, 更新相机 IP 地址。更新后显示如下 Step2:设置 MTU。

C#与VisionPro联合编程
C#与VisionPro联合 1. 参照康耐视提供的样例2. 参照样例写一个1. 创建工程2. 添加引用3. 声明变量4. 初始化5. 刷新队列6. 用户数据获取7. 跨线程访问Windows控件--委托8. 显示图像9. 释放资源 3. 代码4. 资源下载 1. 参照康耐视提供的样例 C:\Program Files\Cognex\VisionPro\samples\Progr
C#与VisionPro联合编程
C#与VisionPro联合 1. 参照康耐视提供的样例2. 参照样例写一个1. 创建工程2. 添加引用3. 声明变量4. 初始化5. 刷新队列6. 用户数据获取7. 跨线程访问Windows控件--委托8. 显示图像9. 释放资源 3. 代码4. 资源下载 1. 参照康耐视提供的样例 C:\Program Files\Cognex\VisionPro\samples\Progr
工业机器视觉megauging(向光有光)使用说明书(十二,轻量级的visionpro)
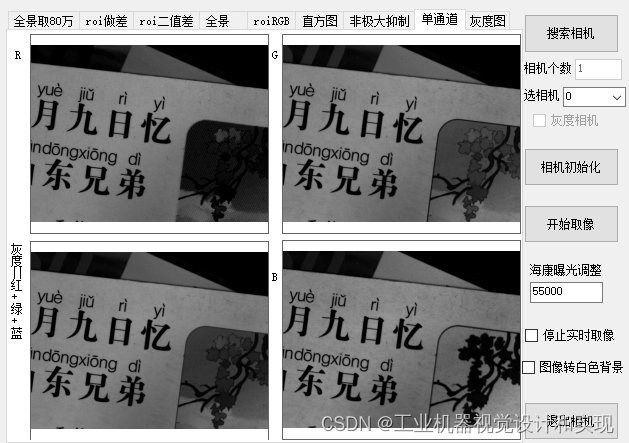
关于最后一个工具的介绍:就是这个“相机图像” 我们可以鼠标双击点进去看一看: 在图像上点击,就可以截取一块图像,是可以放大缩小的,这个放大很low,是我以前研究缩放入门时的版本,本想删除,没舍得删。 下面的combox框,可以选七种不同的已处理的图像,给其他工具用,原来在相机dll界面里,觉得相机界面现在还是很臃肿,还得继续精简。 以上7中图像可以在相机界面看到: 0,是默认

工业机器视觉megauging(向光有光)使用说明书(十五,轻量级的visionpro)
程序(软件)的一些不足和建议:(后续会跟进) 不足:(如果你发现了,谢谢及时提出来) 1,找线工具有噪点抑制功能;blob跟随工具,匹配跟随工具中还没更新进去 2,抓圆工具的噪点抑制功能还未加进去 3,我们的工具组暂时不可以扩展,其实先前是可以扩展的,已经测试是ok的,程序太臃肿,只是先精简出来一个版本 4,我们的工具组,都是自己搭建出来的,暂时没有用微软的treeview控件 5,我