vir专题
VIR-SLAM代码分析3——VIR_VINS详解之estimator.cpp/.h
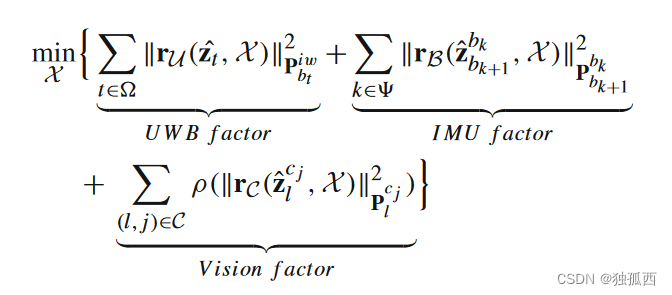
前言 续接上一篇,本本篇接着介绍VIR-SLAM中estimator.cpp/.h文件的函数,尤其是和UWB相关的相比于VINS改动过的函数,仍然以具体功能情况+代码注释的形式进行介绍。 重点函数介绍 优化函数,代码是先优化,后边缘化。 void Estimator::optimization(){ceres::Problem problem;ceres::LossFunction *

VIR-SLAM代码分析2——VIR_VINS详解
前言 VIR-SLAM中VIR_VINS文件夹下是基于VINS-mono的结合UWB传感器的估计器,主要改动的文件在uwb_posegraph,vir_estimator中。其他文件夹完成的是UWB数据的处理问题,比较简单上一节介绍足够,代码也容易看懂。本节介绍的VIR_VINS是VIR-SLAM的核心内容。 1、uwb_posegraph 启动uwb_posegraph节点的启动代码在l