uorb专题

PX4的UORB通信机制
在Firmware的msg文件夹里面,里面有很多.msg结尾的文件,这些msg文件在编译的时候可以生成h头文件,这些编译过程中生成的头文件一般是保存在build_default/src/module/uorb/topics。 添加msg文件的时候,首先把写好的msg文件放在msg文件夹里面,然后还有一个需要修改的就是cmakelist这个文件,要在这个文件里面把你的msg文件的名字加进去。 在
px4开源飞控uORB学习笔记
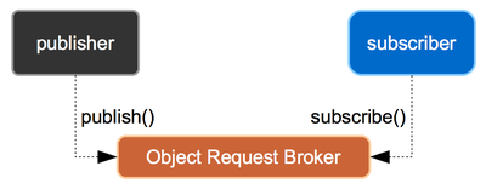
这下面最重要的我觉得是这个图 摘自:https://www.cnblogs.com/kinson/p/12108591.html px4开源飞控uORB学习笔记 1、uORB是什么,起什么作用? uORB(Micro Object Request Broker,微对象请求代理器)是PX4/Pixhawk系统中非常重要且关键的一个模块,它肩负了整个系统的数据传输任务,所有的传感器数据、

《一本书看懂多旋翼》里面讲了如何在PX4里添加自定义msg并发布和订阅uORB
《一本书看懂多旋翼》里面讲了如何在PX4里添加自定义msg并发布和订阅uORB 这样可以很大帮助我写这个PX4驱动。 我感觉可以结合这两篇博文一起看 https://blog.csdn.net/sinat_16643223/article/details/119303922 https://blog.csdn.net/sinat_16643223/article/detail

PX4固件通过UART连接串口读取超声波,和树莓派3通信(似乎讲了怎么添加驱动程序,添加自定义msg,还有uORB消息订阅,佩服,感觉做了我想做的!)
转载自:https://blog.csdn.net/qq_28773183/article/details/78137434 PX4固件通过UART连接串口读取超声波,和树莓派3通信 勤奋比天赋更重要 2017-09-29 21:12:08 2686 收藏 12 分类专栏: PX4研究笔记 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和

PX4二次开发——uorb订阅
PX4二次开发——uorb订阅 一、写在前面 我们写了一个一个功能的模块,这些模块并不是独立的。模块之间是有数据传递的,这样才能组合到一起实现飞行控制的目的。那么解决模块之间的数据传递的方式就是通过uorb订阅的方式。 下面举一个例子,包含了飞控串口读取外部传感器数据,飞控开启一个进程读取外部传感器发布一个 UORB 主题,另一个进程订阅前一个进程发布的主题,还有就是订阅到的主题通过