twincat专题

倍福TwinCAT ADS通讯:变量读写
文章目录 1、PLC变量类型对应C#变量2、读写任意类型变量2.0 官方例程2.1、TcAdsClient类 ReadAny() 方法2.2、TcAdsClient类 WriteAny()方法 3、对上面ReadAny()、WriteAny()方法 做一些集成3.1、使用泛型3.2、使用List泛型 - 实现PLC变量的批量读写 1、PLC变量类型对应C#变量 C# 基本数

PLC Tutorial 0 install twincat 3
打开Twincat界面,三个主要的项目 1、Twincat项目 2、示波器项目 3、HMI(人机交互)项目 Twincat是一款模块化的工具,每一个项目都可以作为主要项目的一个模块,同时也可以在项目中加入自己的模块。 模块中,Twincat Project是最主要的模块 创建完成后,会创建一个solution作为主要的项目,而在这个项目中,可以添加其他的模块。例如这里的measurement
Twincat中PLC编程的ST语言
在Twincat中,PLC编程使用的是Structured Text(ST)语言。ST语言是一种类似于Pascal的高级编程语言,专为工业自动化领域的程序开发而设计。它提供了结构化的控制流和数据操作,使得PLC编程更加高效和可靠。 https://kunaly.blog.csdn.net/article/details/106545705?spm=1001.2101.3001.665

Twincat中PLC的ST语言编程实现机器人安全交互
在TwinCAT中,使用ST语言(Structured Text)进行PLC编程是一种常见的做法。 机器人接触力超过预设阈值后执行停止动作 为了实现机器人在接触力超过预设阈值后停止动作的功能,你需要编写一段ST语言代码,以检查当前的接触力,并在其超过阈值时停止机器人的动作。 VAR Current_Force : REAL; // 当前接触力 Threshold : REAL; //
Twincat中PLC的ST语言编程实现机器人安全交互
在TwinCAT中,使用ST语言(Structured Text)进行PLC编程是一种常见的做法。 机器人接触力超过预设阈值后执行停止动作 为了实现机器人在接触力超过预设阈值后停止动作的功能,你需要编写一段ST语言代码,以检查当前的接触力,并在其超过阈值时停止机器人的动作。 VAR Current_Force : REAL; // 当前接触力 Threshold : REAL; //

Twincat 调试及遇到的问题
524288 count = 360° = 2π rad 1 count = 360°/524288 = 2π/524288 rad 1 count = 0.00069° = 1.2e-5 rad 常见的数据:43690.67 count = (360/12)30° = π/6 rad 87381.33 count =(360/6) 60° = π/3 rad 131072 coun

倍福TwinCAT(贝福Beckhoff)常见问题(FAQ)-人机界面HMI自锁按钮和自复位按钮如何理解(Toggle variable Tap variable)
我分别创建两个按钮,自锁和自复位,绑定到主程序的两个布尔值上去 自锁按钮是指点击一下为TRUE,再点击一下为FALSE,自复位按钮是指按下的时候为TRUE,松开的时候为FALSE(也可以勾选Tap FALSE设置成按下的时候为FALSE,松开的时候为TRUE),这样TC2倒是可以实现类似于有TC3的JOG点动按钮了,即MouseDown和MouseUp的事件分别响应
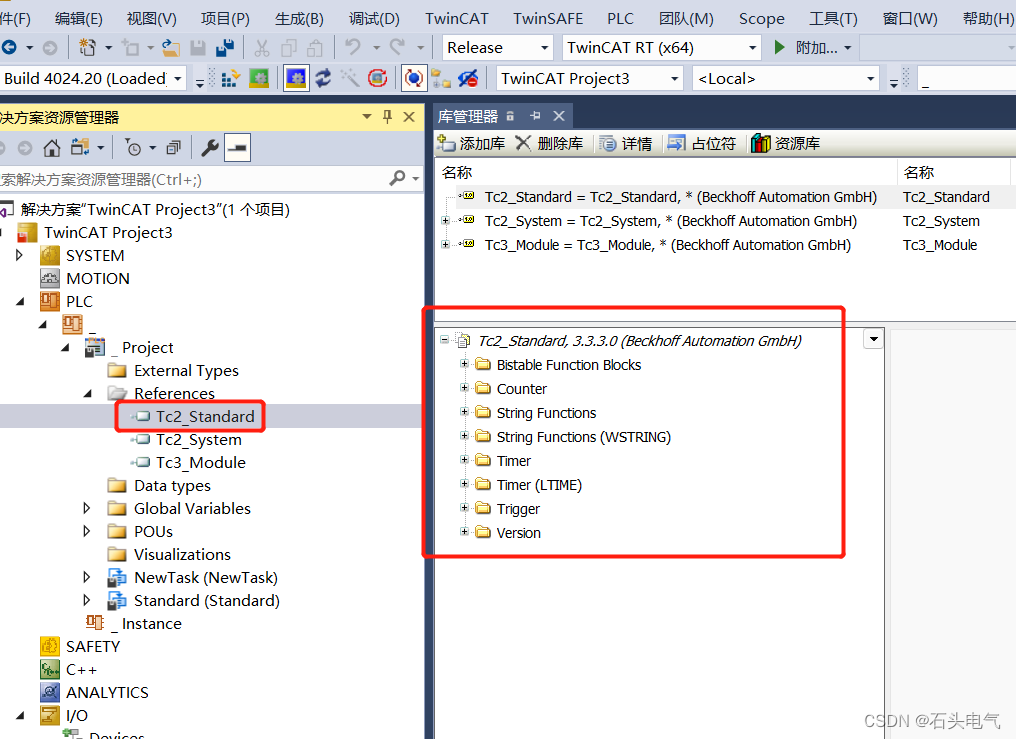
倍福TwinCAT软件Tc2_Standard功能块介绍(1)
目录 Tc2_Standard 1. Bistable Function Blocks (1) RS (2) SR 2. Counter (1) CTD (2) CTU (3) CTUD 3. Timer (1) TOF (2) TON (3) TP 4. Timer(LTIME) (1) LTOF (2) LTON (3) LTP
