trangle专题
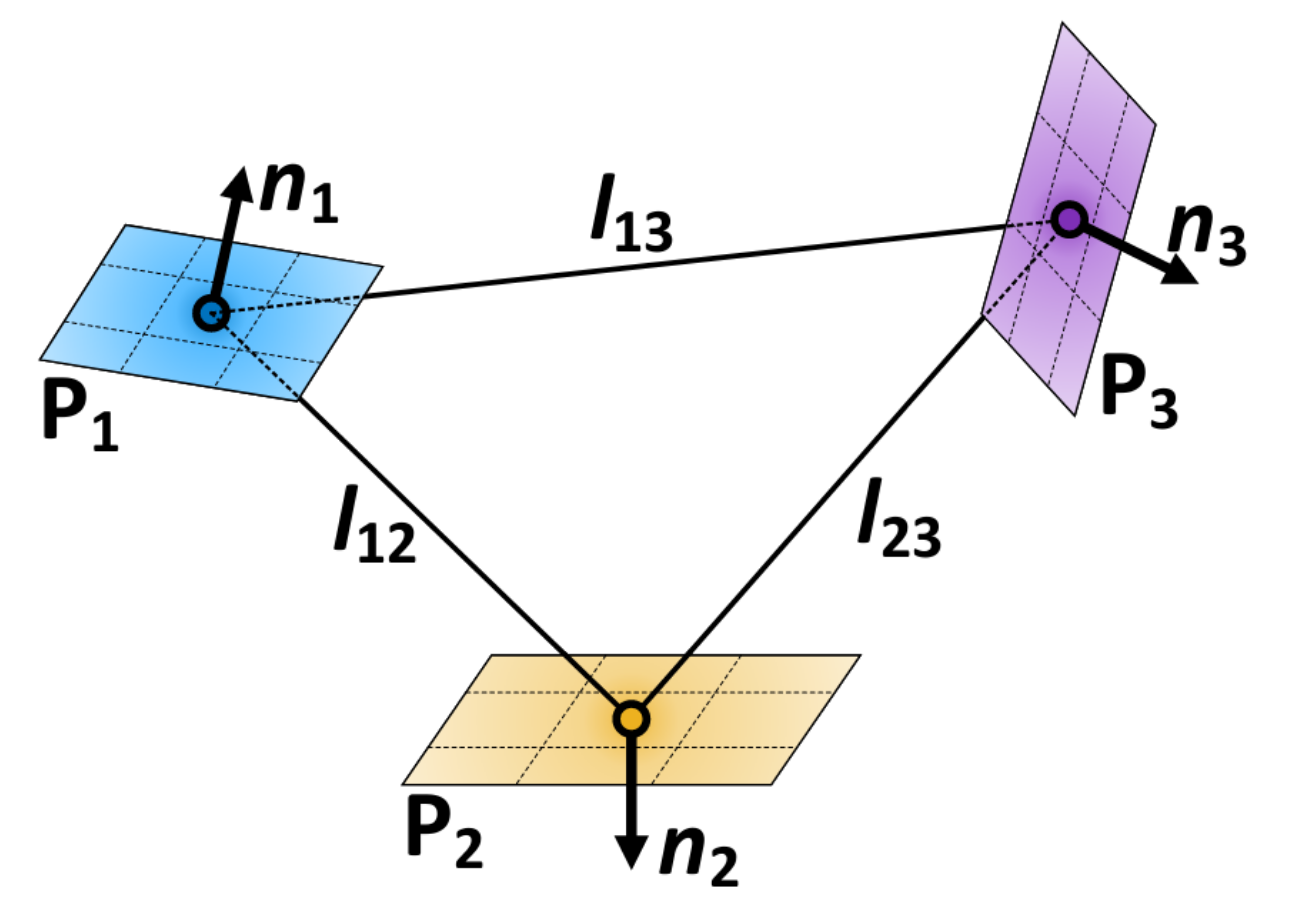
回环检测算法:Stable Trangle Descriptor
回环检测是指检测传感器的两次测量(如图像、激光雷达扫描)是否发生在同一场景,它是对于SLAM问题至关重要。基于激光雷达的回环检测应该满足如下要求: 无论视点如何变化,回环检测方法应该实现旋转和平移不变性;回环检测方法对不同的点云密度和环境应具有鲁棒性,因为激光扫描点云的稀疏性随距离、场景和激光雷达类型而变化;回环检测算法能够更好的提供两帧激光扫描之间的相对位姿,一个好的初始值能让后续的配准算法收