toolschain专题

exec: /opt/FriendlyARM/toolschain/4.4.3/bin/.arm-none-linux-gnueabi-gcc: not found
ubuntu 使用arm-linux-gcc提示,明明工具存在,而且环境变量也设置好了 /opt/FriendlyARM/toolschain/4.4.3/bin//arm-linux-gcc: 15: exec: /opt/FriendlyARM/toolschain/4.4.3/bin/.arm-none-linux-gnueabi-gcc: not found file /opt/
【toolschain】关于anaconda安装包时候 系统级全局安装还是安装在虚拟环境里的问题总结
关于安装方式决定所被安装环境的问题 借机会研究了一下 关于处在anaconda虚拟环境下的 安装方式的不同 安装路径不同的问题,并总结如下原则: conda 无法管理或者conda库查不到的,自然只能通过其他方式安装,那么路径就不在虚拟环境下 比如显卡驱动在conda环境下 但是不用conda安装 用yam apt-get src编译再install等也会是全局的为了使用隔离环境,常出现多版本
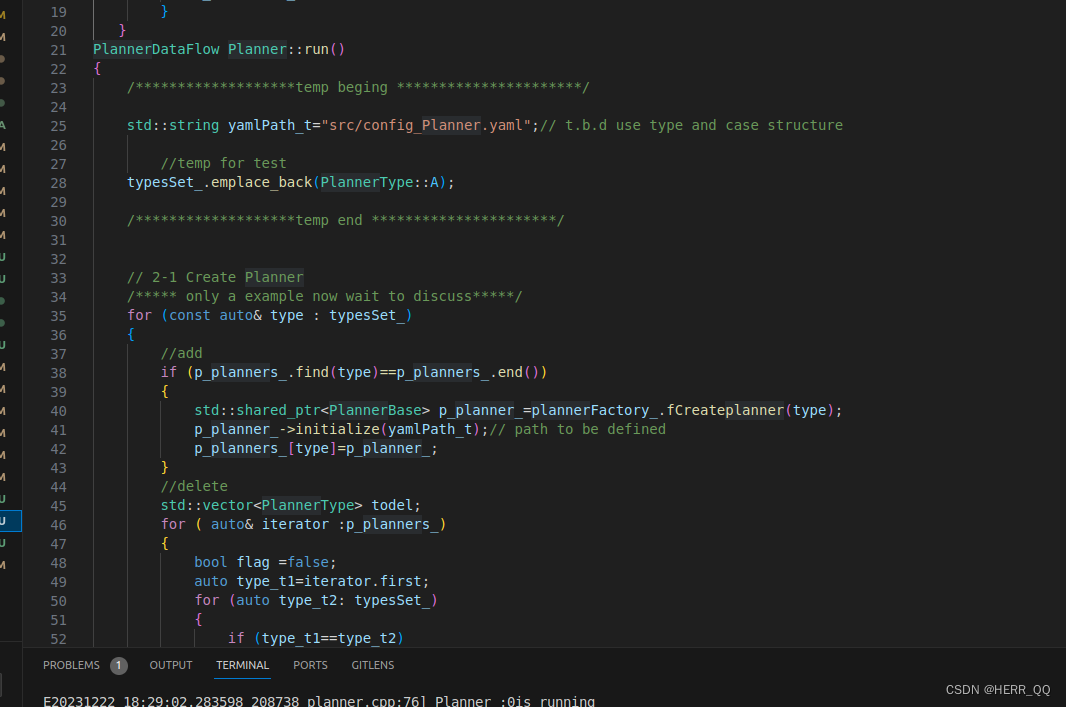
【toolschain algorithm cpp ros】cpp工厂模式实现--后续填充具体规划算法,控制器版的已填充了算法接入了仿真器
写在前面 现在局势危机,于是想复习一下之前写的设计模式,之前提到,做过一个闭环仿真器(借用ros),见https://blog.csdn.net/weixin_46479223/article/details/134864123我的控制器的建立遵循了工厂模式(多态、工厂、客户订阅)。 目前按照之前的设计,把规划器也改写成类似的模式。未来接入我的闭环仿真器械中。 本篇文章只设计框架的搭建,具体算
【toolschain algorithm cpp ros】cpp工厂模式实现--后续填充具体规划算法,控制器版的已填充了算法接入了仿真器
写在前面 现在局势危机,于是想复习一下之前写的设计模式,之前提到,做过一个闭环仿真器(借用ros),见https://blog.csdn.net/weixin_46479223/article/details/134864123我的控制器的建立遵循了工厂模式(多态、工厂、客户订阅)。 目前按照之前的设计,把规划器也改写成类似的模式。未来接入我的闭环仿真器械中。 本篇文章只设计框架的搭建,具体算
![[Toolschain cpp ros cmakelist python vscode] 记录写每次项目重复的设置和配置 不断更新](https://img-blog.csdnimg.cn/direct/f339114c83bb4e2fb9e0d28f2d1e5add.png)
[Toolschain cpp ros cmakelist python vscode] 记录写每次项目重复的设置和配置 不断更新
写在前面 用以前的设置,快速配置项目,以防长久不用忘记,部分资料在资源文件里还没有整理 outline cmakelist 复用vscode 找到头文件vscode debug现有代码直接关联远端gitros杂记repo 杂记glog杂记 cmakelist 复用 包含了根据系统路径找库,debug,主动set库路径,单元测试用,和常用的加入头文件与源文件 cmake_minimum
[Toolschain cpp ros cmakelist python vscode] 记录写每次项目重复的设置和配置 不断更新
写在前面 用以前的设置,快速配置项目,以防长久不用忘记,部分资料在资源文件里还没有整理 outline cmakelist 复用vscode 找到头文件vscode debug现有代码直接关联远端gitros杂记repo 杂记glog杂记 cmakelist 复用 包含了根据系统路径找库,debug,主动set库路径,单元测试用,和常用的加入头文件与源文件 cmake_minimum