susan专题
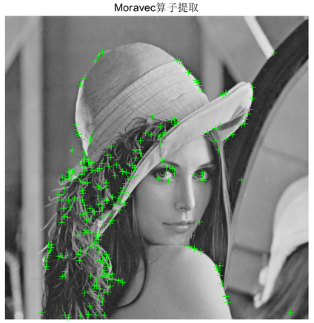
计算机视觉与模式识别实验2-1 角点检测算法(Harris,SUSAN,Moravec)
文章目录 🧡🧡实验流程🧡🧡Harris算法SUSAN算法Moravec算法 🧡🧡全部代码🧡🧡 🧡🧡实验流程🧡🧡 Harris算法 Harris算法实现步骤: w表示窗函数,在这个算法中,用于对梯度图像的平方进行滤波,以减少图像中的噪声,从而提高角点检测的准确性。R(i,j) 表示图像中像素点 (i,j) 处的角点响应值。这个值描述了在该像素点周围区域

1620 - Lazy Susan【数学】
题目大意样例 inputoutput解释 思路代码Hit 题目大意 传送门 将1~n(8<=n<=500)放到一个圆盘里,每个数字都出现一次。(可以首尾相连) 每次可以选择连续的4个数字翻转顺序,最后问能不能变成1,2,3,4,5,6…n的顺序。 样例 input 2 9 1 9 8 3 7 6 5 4 2 11 1 3 2 4 5 6 7 8 9 10 1

【C++PCL】点云处理SUSAN关键点提取
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 2.代码效果 3.源码展示 4.

SUSAN角点及边缘检测方法详解
SUSAN检测方法是一种基于窗口模板的检测方法,主要是通过在图像每个像素点位置处建立一个窗口,这个窗口是圆形的,这里为了得到各方向同性的响应,窗口内可以是常数权值或高斯权值,一般情况下,窗口半径为3.4个像素(即窗口内总有37个像素)。 这样的窗口模板被放置在每个像素的位置,确定点之间强度相似程度可以由下面的图来描述,这里的x轴是指像素点之间强度差别,y轴指的相似程度,为1就指完全相似。
susan算子python实现
文章是自己写的,仅供参考如有错误欢迎指正(河理社恐男孩李某注) Susan算子代码思路: SUSAN算子原理,SUSAN使用一个圆形模板,通过对比检测模板中的像素与中心像素的偏离程度,来判断中心像素是否为边缘或角点。 代码实现步骤: 首先创建圆形模板,进行相似性判断,判断公式如下: 公式的大概意思就是将圆形模板的像素点像素和中心像素进行对比,c为布尔结果,如果他们之差小于返回值

SUSAN关键点检测以及SAC-IA粗配准
一、SUSAN关键点检测 C++ #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/common/io.h>#include <pcl/visualization/pcl_visualizer.h>#include <boost/thread/thread.hp

基于特征的图像匹配c语言,一种基于SIFT和SUSAN特征的图像匹配方法
摘 要: 针对SIFT方法在角点检测上的不足,提出了一种基于SIFT和SUSAN混合特征匹配的自动匹配算法。算法应用SIFT 和SUSAN 两种具有互补特性的局部不变特征,利用SIFT方法检测空间极值特征点,利用SUSAN方法检测角点,结合两种特征点位置,利用SIFT方法生成匹配特征向量,最后根据最近邻特征点距离与次近邻特征点距离之比确定初始匹配点对,实现图像的配准。实验表明该算法有效,能够
SUSAN关键点检测以及SAC-IA粗配准
一、SUSAN关键点检测 C++ #include <iostream>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/common/io.h>#include <pcl/visualization/pcl_visualizer.h>#include <boost/thread/thread.hp

Susan Ochs加盟PSB担任金融服务全球主管
纽约--(美国商业资讯)--全球研究咨询公司PSB今天宣布,Susan Ochs已加盟公司担任高级副总裁兼金融服务全球主管,即刻生效。Ochs将驻纽约办公,负责金融服务业务的全球发展,同时为其他行业业务提供支持。 PSB首席执行官Mike Chuter表示:“目前我们在金融领域与许多了不起的品牌开展合作,我们深以为豪。有了Susan在公私金融市场方面的专长,我们将能够为现有及今后的合作伙伴

Harris、SUSAN角点检测Matlab源代码
角点检测主要运用于运动检测、图像匹配、视频跟踪、三维建模、目标识别。常用的几种基于灰度变化的算法有K.R,Harris,KLT,SUSAN,MORAVEC。 角点检测=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪灰度图⎧⎩⎨梯度模版混合二值图轮廓图 \textbf{角点检测}=\begin{cases}\textbf{灰度图}\begin{cases
Harris、SUSAN角点检测Matlab源代码
角点检测主要运用于运动检测、图像匹配、视频跟踪、三维建模、目标识别。常用的几种基于灰度变化的算法有K.R,Harris,KLT,SUSAN,MORAVEC。 角点检测=⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪灰度图⎧⎩⎨梯度模版混合二值图轮廓图 \textbf{角点检测}=\begin{cases}\textbf{灰度图}\begin{cases