spidar专题
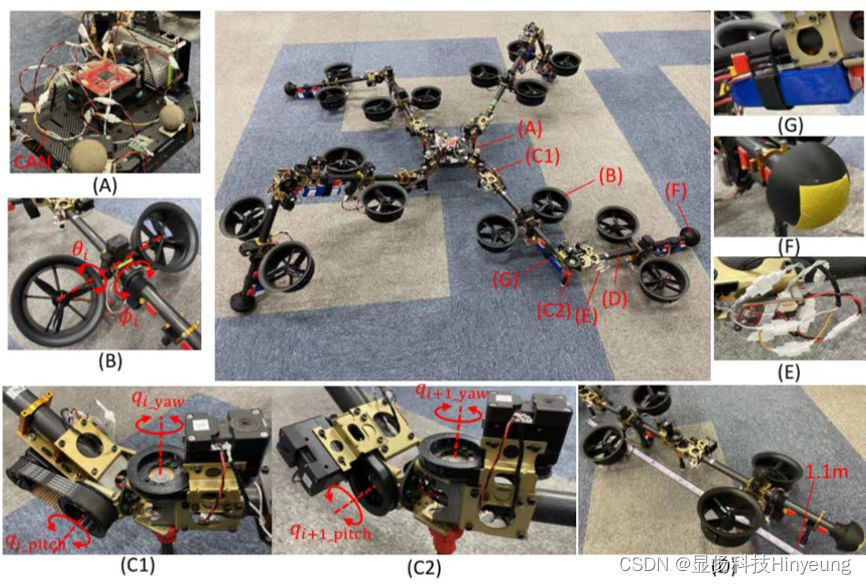
东京大学最新研究成果!一种可实现陆空两栖的新型四足机器人SPIDAR,具备多模态运动能力
原创/文 BFT机器人 现实中,蜘蛛可以凭借飘荡的蛛丝在空中漂浮,让它们能够穿越复杂地形。普通蜘蛛长度只有几毫米,重量只有几十克,如何让比蜘蛛重数百倍的机器人实现多模态运动,是众多学者研究的热点。 具有多模态运动能力的机器人,几乎都是移动系统的大杂烩,不能真正实现协同工作。例如,通过给多足机器人装上一堆螺旋桨们,能够让机器人实现飞行,但在其他时间,足或者螺旋桨对机器人本身来说只是增添额