siggraph专题
SIGGRAPH 2022 | 筷子该怎么用? ——基于贝叶斯优化和强化学习的灵巧手握筷及控制方法
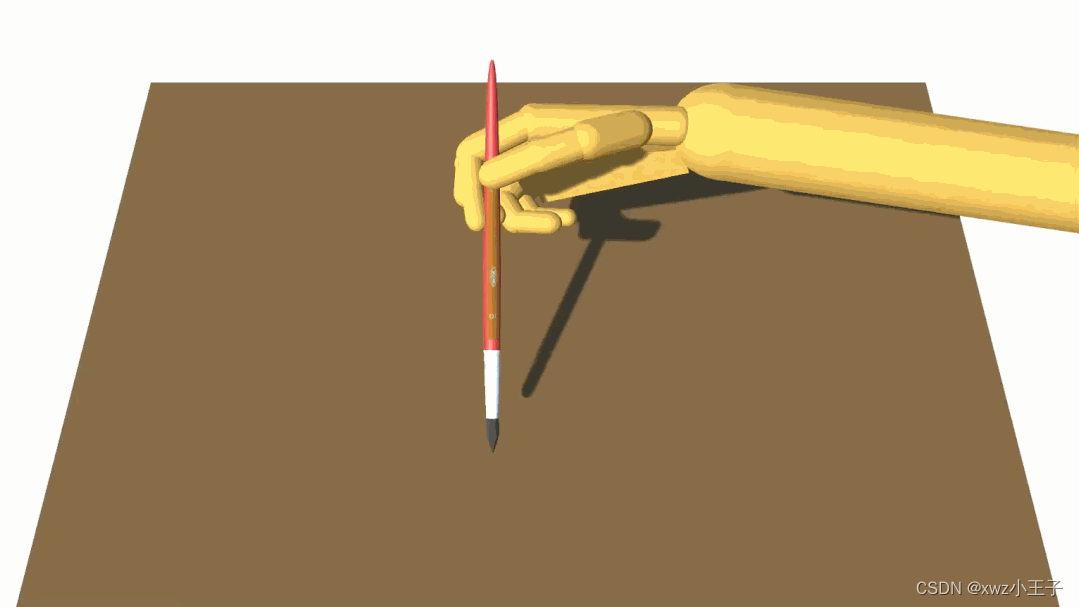
使用仿生手灵巧地操作工具一直是计算机动画和机器人方向的一个长期具有挑战性的问题。工具使用的主要困难包括:手的高自由度;工具的欠驱动;以及手、工具和物体之间复杂的相互作用。操作的困难程度也取决于所涉及的工具类型。有些工具只需要牢牢地抓在手里,如锤子。有些工具需要用手来抓取和操纵,如剪刀。在本文中,我们考虑最具有挑战性的工具之一:筷子。 筷子是一双等长的棍子,这种简单的机械设计对控制任务带来了一些挑
SIGGRAPH 2022 | 筷子该怎么用? ——基于贝叶斯优化和强化学习的灵巧手握筷及控制方法
使用仿生手灵巧地操作工具一直是计算机动画和机器人方向的一个长期具有挑战性的问题。工具使用的主要困难包括:手的高自由度;工具的欠驱动;以及手、工具和物体之间复杂的相互作用。操作的困难程度也取决于所涉及的工具类型。有些工具只需要牢牢地抓在手里,如锤子。有些工具需要用手来抓取和操纵,如剪刀。在本文中,我们考虑最具有挑战性的工具之一:筷子。 筷子是一双等长的棍子,这种简单的机械设计对控制任务带来了一些挑
![[SIGGRAPH-23] 3D Gaussian Splatting for Real-Time Radiance Field Rendering](https://img-blog.csdnimg.cn/8c9dec18a06c4ca8bc41e0fd5ce729b9.png)
[SIGGRAPH-23] 3D Gaussian Splatting for Real-Time Radiance Field Rendering
pdf | proj | code 本文提出一种新的3D数据表达形式3D Gaussians。每个Gaussian由以下参数组成:中心点位置、协方差矩阵、可见性、颜色。通过世界坐标系到相机坐标系,再到图像坐标系的仿射关系,可将3D Gaussian映射到相机坐标系,通过对z轴积分,可得到对应Splatting 2D分布。针对3D Gaussians,提出对应的优化方法。去除可见性太低的高

SIGGRAPH Asia 2022 | 一句话生成高清360度场景及光照,可直接渲染数字资产
来源:机器之心 本文约2000字,建议阅读9分钟 来自南洋理工大学 S-Lab 的研究者提出了一个基于零次学习文本驱动的 HDR 全景图合成框架。 作者:MMLab@NTU 伴随着元宇宙的浪潮和虚拟现实技术的不断进步,业内对于 3D 逼真写实渲染的需求愈发凸显。除去建模精细度,环境光照也是影响渲染质量的重要因素。在所有的图形学技术中,高动态范围全景贴图(HDRI)能够提供逼真的场景光照和沉浸