rtabmap专题
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航
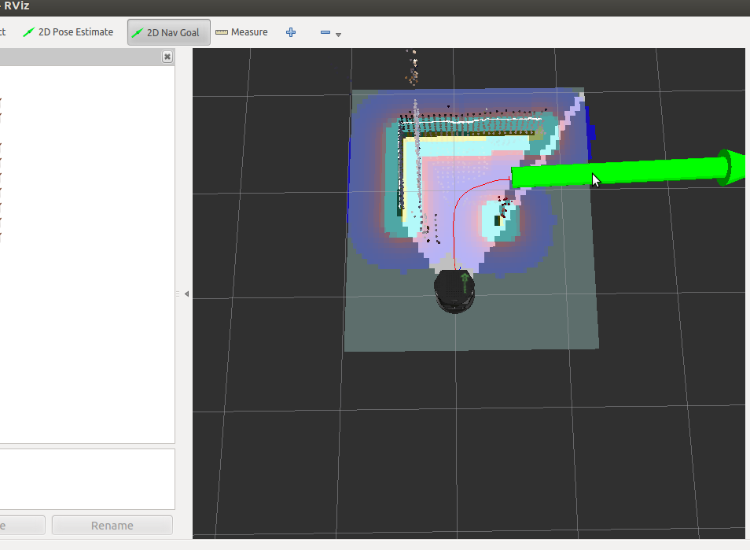
ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 ROS与VSLAM入门教程-rtabmap_ros-利用turtlebot实现建图和导航 说明 介绍如何使用turtlebot通过rtabmap_ros进行建图和导航 安装相关包: Kinetic $ sudo apt-get install ros-kinetic-turtlebot-bringup r

安装rtabmap_ros包
一、前言 RTAB-Map (Real-Time Appearance-Based Mapping)是一种基于全局贝叶斯闭环检测的RGB-D Graph SLAM方法。它可以用kinect的深度信息结合kinect变换得到的激光数据进行即时定位与建图(gmapping算法志只用到了kinect转换得到的激光数据,而把深度信息丢弃了)。 官网地址:http://introlab.github.i