robi专题
RTP(Robi改造计划)--- Stretch可以跑Kinetic了
折腾了蛮久更新版本,起因是gcc 4.9不支持结构体指定初始化但是我很喜欢它;于是打算更新成5.x或者6.x,然后连操作系统一起更新成stretch了---虽然这风险很大,但是我就是这么轴啊。。。紧接着ROS肯定是不行了,于是也干脆更新为kinetic算了。 好消息是kinetic在raspberry的源码编译比indigo好多了;当然选择ros_comm, 后续再添加,好过浪费时间在不需要的

Robi改造计划RTP---状态更新:tensorflow已通,ROS中
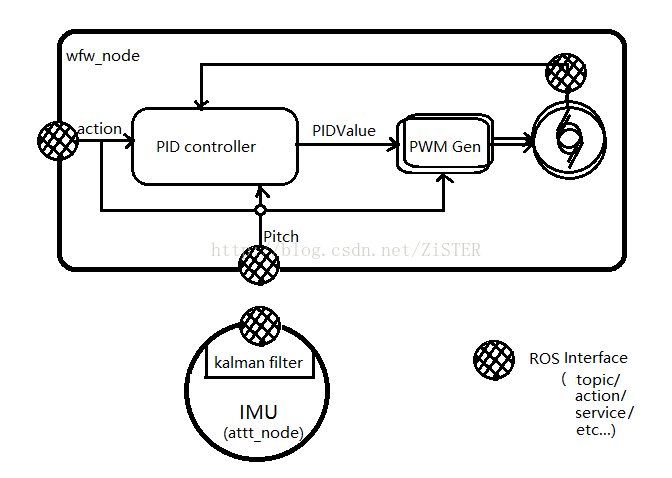
tensorflow上个月已通,可以识别图片了。目前进度有点缓慢,除了搞整体结构,仍在研读ROS中,打算近期把: 1)moveit 2)tf 3)行为树 塞到一起,让它整体工作起来。 行为树控制机器人行为,moveit和tf负责动作,再把语音和图像也整合起来。 之前想的图是这样(但是看起来要有很多变化了): 现在我才发现这是个巨大的工程,我靠,陷进去了。 每一个点都很深,如果
Robi改造计划RTP---人脸识别可以动了
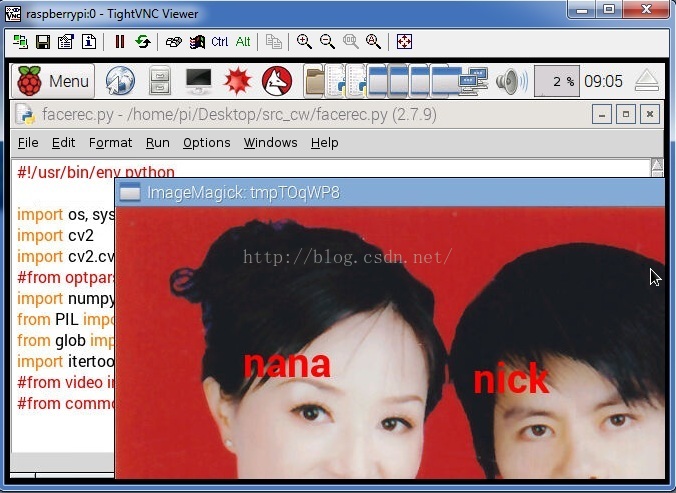
在树莓派3B上人脸检测/识别也可以跑了,我相信在2B上也可以跑,因为没感觉特别慢。 现在已经可以做到能看了和识别人了,下一步应该是把它整合进ROS里面,计划5月底把TTS、STT、人脸检测识别和机器人动作控制都装进ROS里面,就可以初步出个demo了。 人脸识别这事中间没什么大坑, 1)倒是我一直用网线和VNC连接树莓派,发现VNC不能直接显示树莓派传过来的图片,装了x11vnc