realsense435i专题
ROS 手眼标定 realsense435i+ur5e
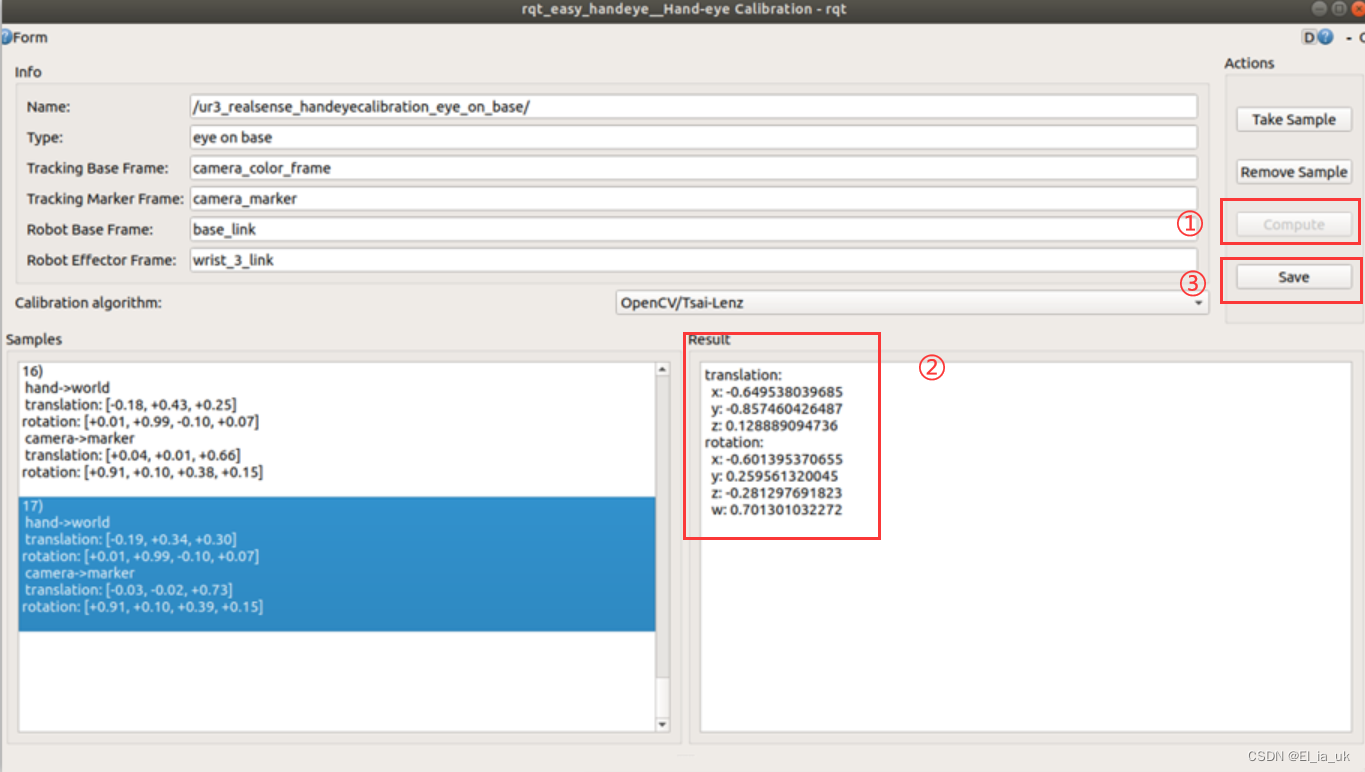
手眼标定的原理 基坐标系(base_tree)和相机(camera_tree)两个坐标系属于不同的tree,通过将标签贴到手上,相机识别出标签的position和orention,并通过easy_handeye标定包得到tool0(机械手),进一步得到相对于base的位置关系。即子坐标系(camera_rgb_optical_frame)到父坐标系(base_link)之间的关系。 对于手眼