pointpillar专题

使用Pointpillar神经网络识别rosbag中的障碍物
PointPillar-ROS-Node https://github.com/MengWoods/pointpillar-ros-node 调试了一份可以使用的Pointpillar ROS node代码,并发布到了上面的仓库。 运行Node,并play rosbag,使用rviz就可以显示障碍物的BBox。 具体可以参考repo的README文档,文档非常详细的记录了如何使用与环境设置。
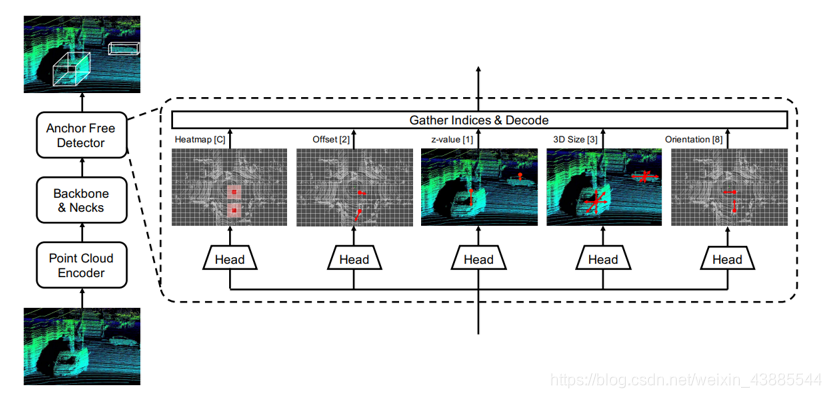
无人驾驶中的激光雷达(四)Pointpillar+CenterNet实现的3D点云目标检测网络
简要介绍 引言基本思路一一说明未完成的东西 引言 好久没总结过新东西了,这次就把最近自己通过拼凑代码实现的一个点云目标检测网络现在这做个总结吧。 不过我的网络还没来得及改进,大思想就和别人的撞车了,人家已经发了CVPR,对于自己这个半成品网络也没什么兴趣继续改进了。 CVPR2021的论文是: Center-based 3D Object Detection and Track