pointcloudlib专题
PointCloudLib 点云Ransac拟合平面功能实现 C++版本
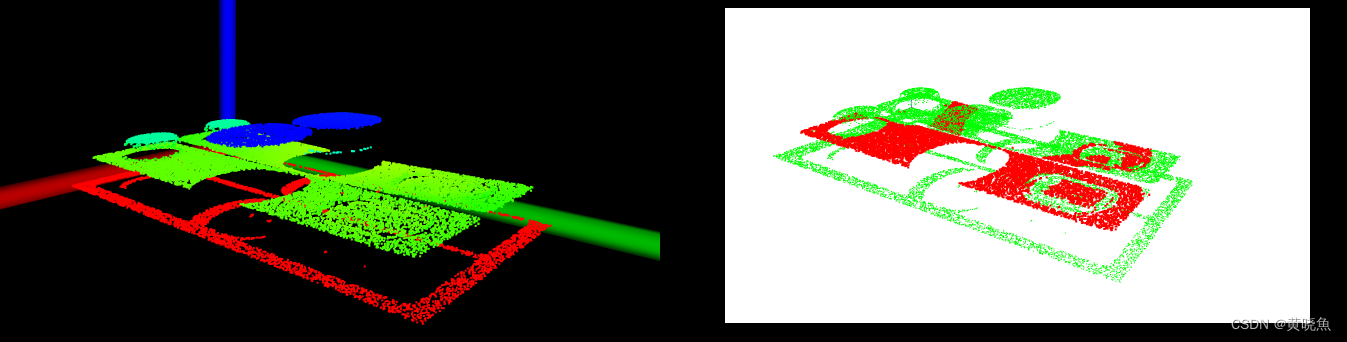
0.实现效果 左图为原始点云,右图中的红色点为拟合平面所选取的点,绿色的点为拟合平面所抛弃的点 拟合出的结果是一个平面方程。 1.算法原理 RANSAC(Random Sample Consensus,随机样本一致性)算法在拟合平面时的工作原理可以概括为以下几个步骤: 随机选择最小样本集: RANSAC算法首先会从数据集中随机选择三个点作为最小样本集。在三维空间中,三个非共线