pied专题
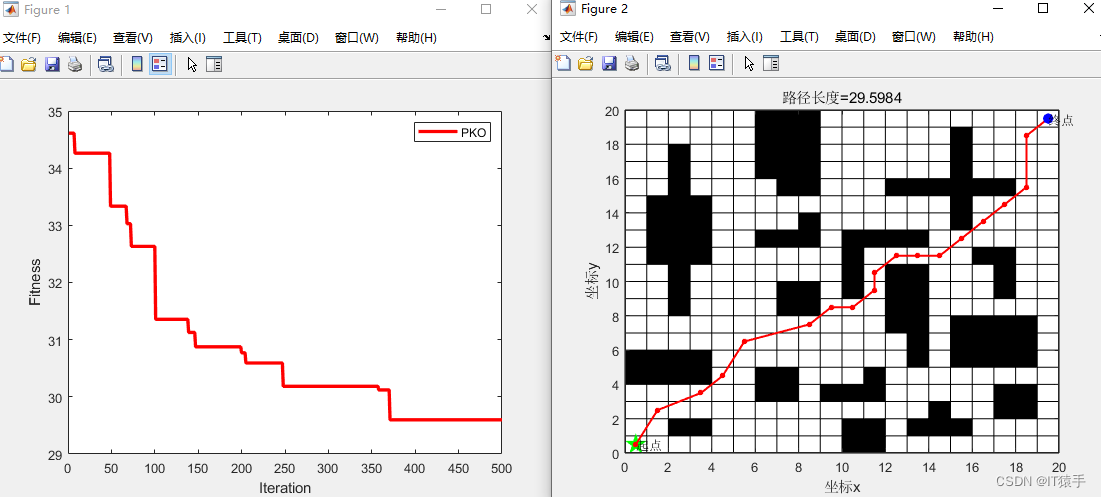
机器人路径规划:基于斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的重要
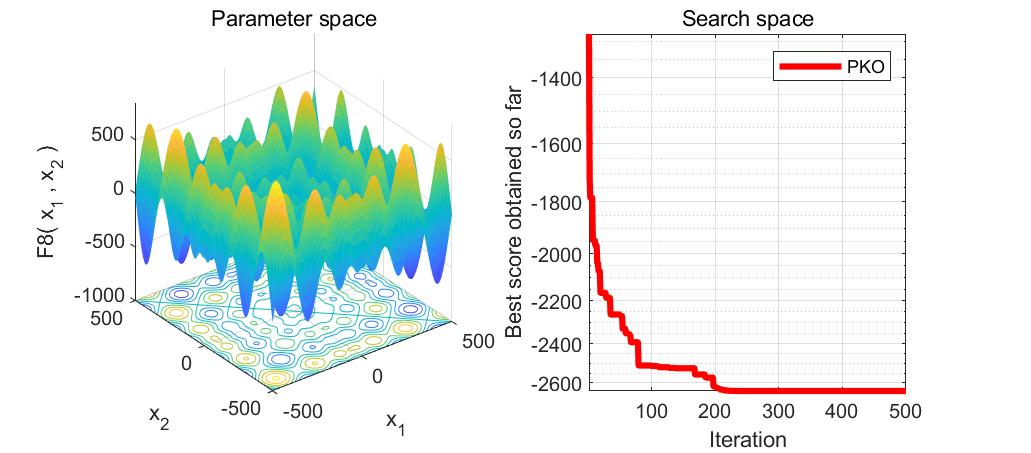
2024最新算法:斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO)求解23个基准函数
一、斑翠鸟优化算法 斑翠鸟优化算法(Pied Kingfisher Optimizer ,PKO),是由Abdelazim Hussien于2024年提出的一种基于群体的新型元启发式算法,它从自然界中观察到的斑翠鸟独特的狩猎行为和共生关系中汲取灵感。PKO 算法围绕三个不同的阶段构建:栖息/悬停猎物(探索/多样化)、潜水寻找猎物(开发/集约化)和培养共生关系。这些行为方面被转化为数学模型,能够有

土曜日威胁情报:杂七杂八小道消息资源+APT报告:MuddyWater/Pied Piper
周六日发点好玩的,惯例往下拉才有东西 威胁情报 一、 在土耳其发现了基于PowerShell的新后门,与MuddyWater Tools非常相似 恶意宏+powershell后门,与之前的不一样,这次的powershell是采用通过使用云文件托管提供商的API进行传输的下面的数据 这个powershell后门会收集系统信息并将各种信息连接成一个长字符串。检索到的数据包括:操作系统名称,域