panoptic专题

Segmentation简记3-UPSNet: A Unified Panoptic Segmentation Network
Segmentation简记3-UPSNet: A Unified Panoptic Segmentation Network 创新点总结实验 创新点 1.统一的全景分割网络 总结 uber的作品 网络结构如下: 还是比较简洁的。 Backbone 采用了原始mask rcnn。 Instance Segmentation Head 使用了最大的特征图,包括bbox回归,分

CV之DL之PanopticFPN:FPN/Panoptic FPN算法的简介(论文介绍)、架构详解、案例应用等配图集合之详细攻略
CV之DL之PanopticFPN:FPN/Panoptic FPN算法的简介(论文介绍)、架构详解、案例应用等配图集合之详细攻略 目录 相关论文 FPN:《Feature Pyramid Networks for Object Detection》翻译与解读 Abstract Panoptic FPN:《Panoptic Feature Pyramid Networks》翻译与解读

Axial-DeepLab: Stand-Alone Axial-Attention for Panoptic Segmentation
Axis-DeepLab:用于全景分割的独立轴注意 Abstract 卷积利用局部性来提高效率,但代价是丢失长范围上下文。自我注意被用来通过非局部的相互作用来增强CNN。最近的研究证明,通过将注意力限制在局部区域来堆叠自我注意层来获得完全注意网络是可能的。在本文中,我们试图通过将二维自我注意分解为两个一维自我注意来消除这一限制。这降低了计算复杂度,并允许在更大甚至全局区域内进行注意。同时,我们
PVO: Panoptic Visual Odometry代码复现(如何在脚本设置GPU选择,软链接映射数据集)
配置环境 代码:https://github.com/zju3dv/pvo 1.拉取代码 git clone https://github.com/zju3dv/pvo 这个工程中的VO_Module中的thirdparty部分需要用DROID-SLAM的替换之后才行 具体参考我另一篇博客 https://blog.csdn.net/qin_liang/article/details/1

手把手带你玩转Nuscenes数据集2——nuScenes lidarseg and panoptic教程
文章目录 准备工作✨✨✨数据读取✨✨✨导入相关库并加载数据集lidarseg和panoptic数据集的点统计panoptic数据集的instance统计获取lidarseg和panoptic的sample token的统计信息⭐⭐⭐渲染lidarseg标签⭐⭐⭐渲染panoptic标签⭐⭐⭐在图像中渲染lidarseg和panoptic 标签⭐⭐⭐渲染sample(例如lidar、radar
【freespace】YOLOP: You Only Look Once for Panoptic Driving Perception论文解读
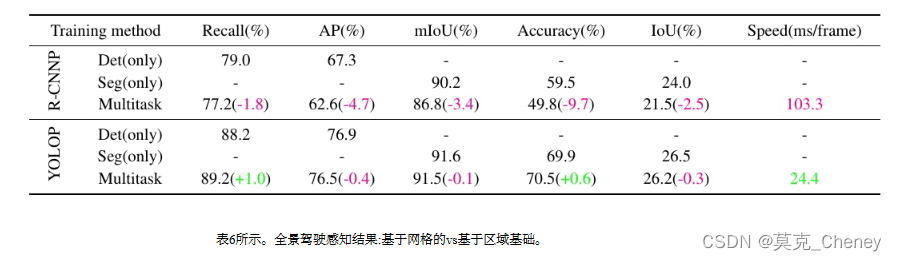
目录 Abstract 摘要 1、简介 2、 相关工作 2.1. 交通目标检测 2.2. 可驾驶区域分割 2.3. 车道检测 2.4. 多任务的方法 3. 方法 3.1. 编码器 3.1.1 骨干 3.1.2 脖子 3.2. 解码器 3.2.1 探测头 3.2.2 可驾驶区域分段头&车道线分段头 3.3. 损失函数 3.4. 训练模式 4. 实验 4.1