odom专题
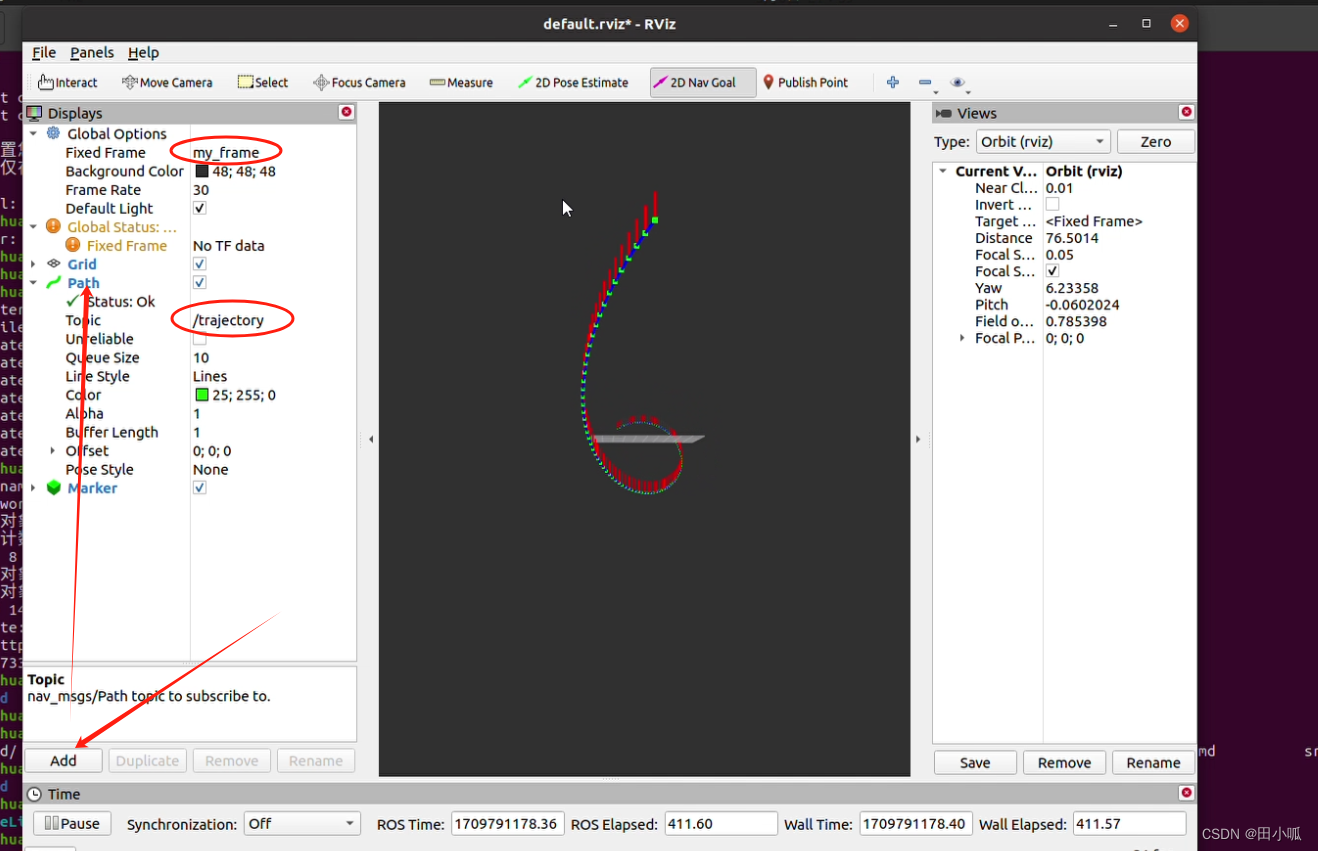
ros rviz基础操作 绘制线条 显示tf 显示odom
ROS 当先所有代码的git仓库 https://gitee.com/tianxiaohuahua/upper_computer_rviz 一、基础 1.创建工作空间 catkin_ws 创建src文件,放置功能包源码: mkdir -p ~/catkin_ws/src 进入src文件夹: cd ~/catkin_ws/src 初始化文件夹: catkin_init_wor
ROS导航中关于odom frame的理解
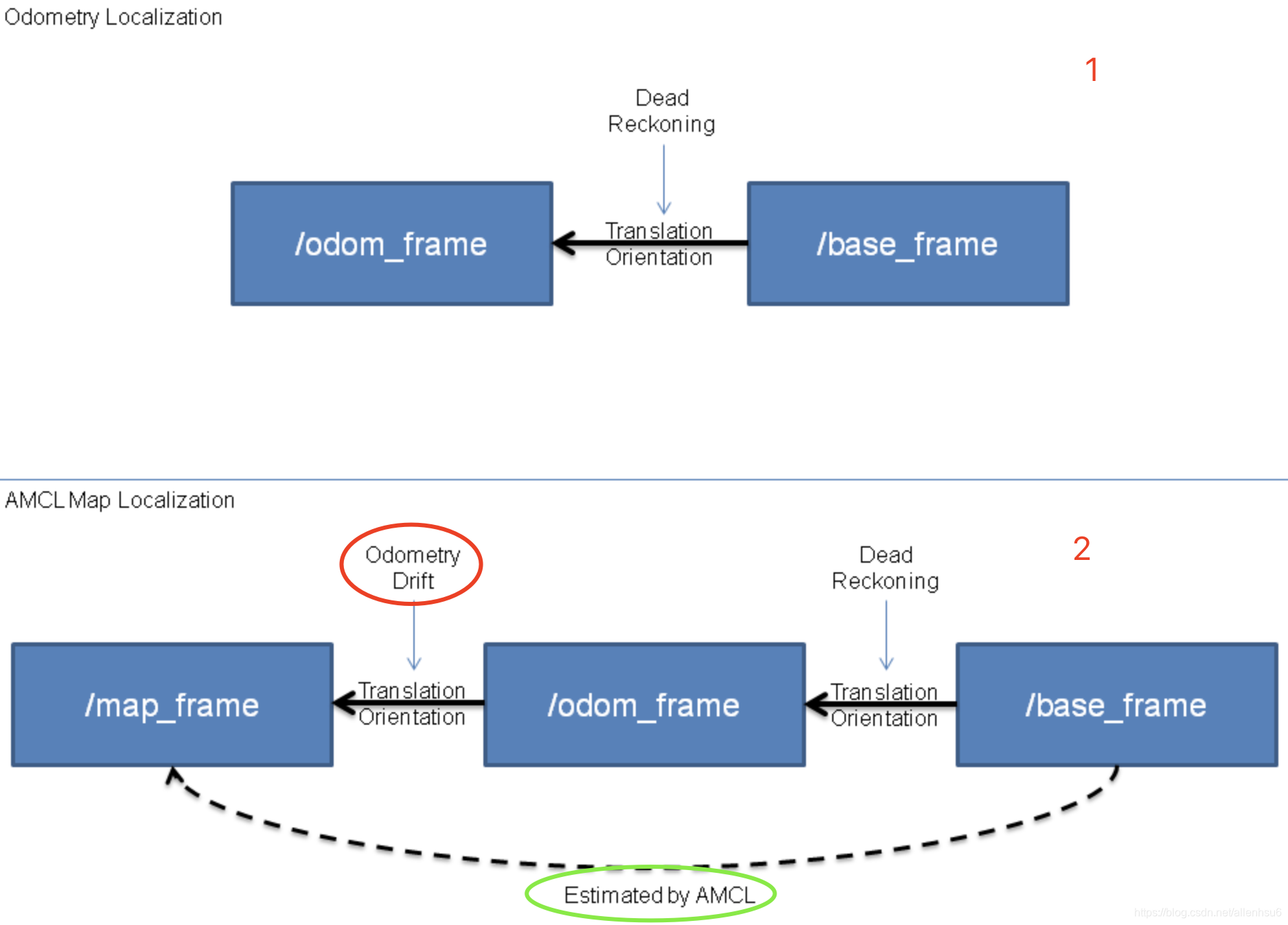
关于navigation的基本介绍,已经足够入门者学习使用。 其中最难理解的部分我认为是/odom这个frame。因为他有点反人类直觉。 odometry是通过航迹推算算出来的机器人位姿。但是,想要表明机器人位姿,必须有两个坐标系的相对关系才能表示出来对吧?那这个推算的位姿就是/odom_frame和/bae_frame之间的tf变换。如下图中1部分所示。 同样机器人与真实环境之间也有一个相
ROS 学习系列 -- RViz中移动机器人来学习 URDF,TF,base_link, map,odom和odom 主题的关系
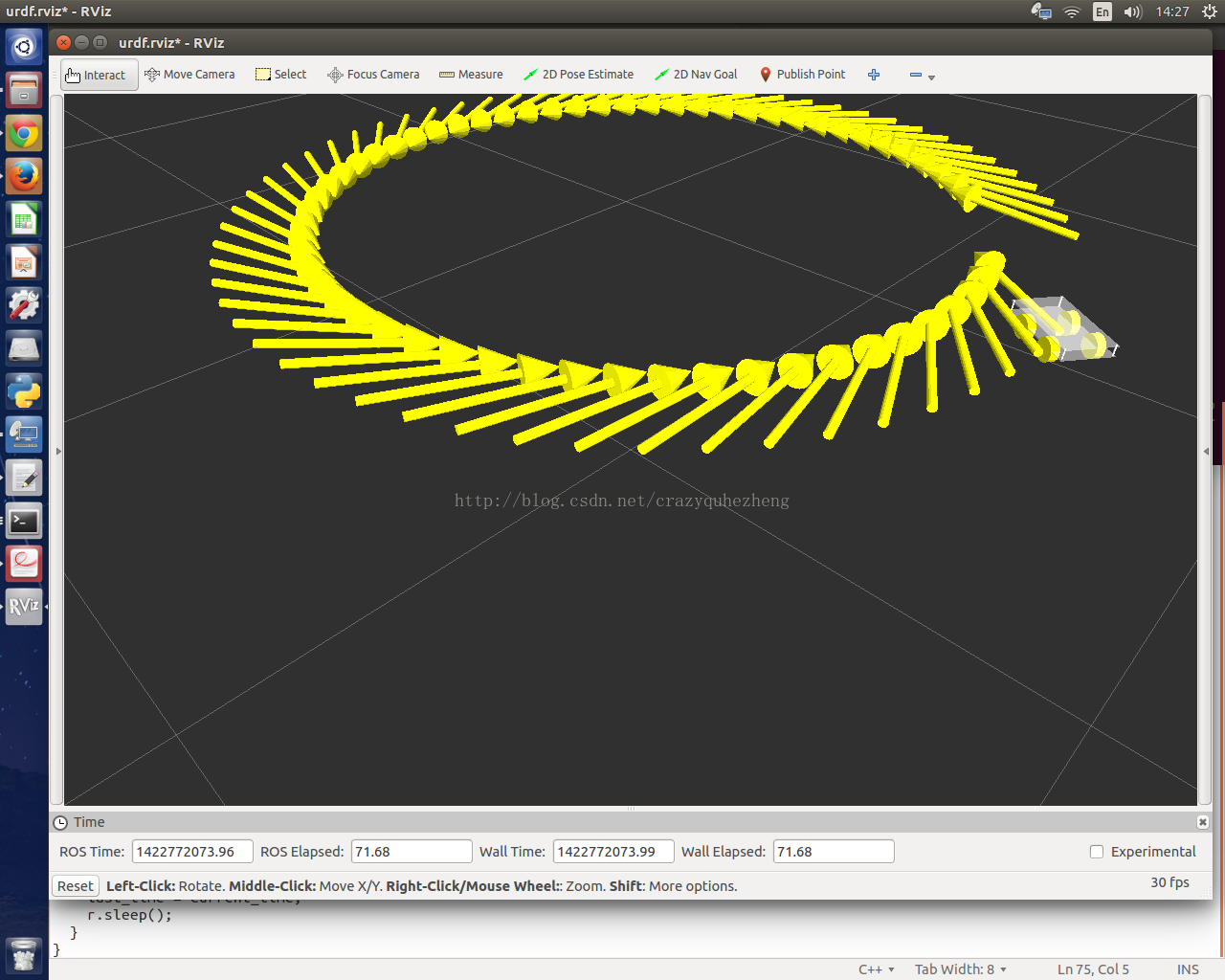
转自:http://blog.csdn.net/crazyquhezheng/article/details/43346907 前面已经介绍了如何使用URDF建造机器人小车并显示在Rviz的仿真环境里面,但是小车是静止的。下面介绍如何让它在Rviz里面动起来,并理清URDF,TF 和 odom 的关系。 1. ROS中base_link, odom, fixed_frame, tar

ROS中/odom,/map,/base_link几个坐标系的含义:从ROS的REP105严谨介绍
这两日看lego-loam,其中的坐标系定义很混乱。 在lego-loam的一个issue中,作者指出他坐标系定义是完全按照ROS的REP103和105的建议的。 然后又看到了关于/odom, /map, /base_link 几个坐标系的含义的说明,因此整理一下。 关于ROS的REP 关于REP:https://ros.org/reps/rep-0000.html The REP con