mujoco专题

ubuntu 安装 mujoco-py
我在使用下面pip命令安装gym的时候的时候,报错: $ pip install 'gym[all]'ERROR: Failed building wheel for mujoco-py 然后详细看了一下提示原因: You appear to be missing MuJoCo. We expected to find the file here: ~/.mujoco/mujoc

Aloha机械臂的mujoco仿真问题记录
今天在测试ACT代码时,遇到了仿真中的机械臂无法摆放正确的姿势来抓去红色方块。 后来经过测试,发现应该是python包的版本问题有误,下面记录下正确的包版本: 官方给出的包: conda create -n aloha python=3.8.10conda activate alohapip install torchvisionpip install torchpip ins
搭建强化学习的机械臂MuJoCo环境以及urdf转xml文件方法
一、背景 基于强化学习的机械臂应用日趋广泛,摆脱了基于模型到达固定点的束缚。基于强化学习算法,机械臂可以完成拧魔方、推抓任务(Andy Zeng的经典论文),暂且想一下如果用传统方法完成此类复杂任务是何等困难。 强化学习作为一种试错的方式,在真实机械臂上进行训练不仅耗时,且会对环境或机器造成损坏,而在仿真环境中进行训练是一种可行的方式。MuJoCo作为当前主流的强化学习化境配置较为繁琐,这里简
MuJoCo 入门教程(二)
系列文章目录 前言 一、简介 本章介绍 MuJoCo 的数学和算法基础。对于熟悉广义或关节坐标建模和仿真的读者来说,整体框架是相当标准的。因此,我们将对这些材料进行简要总结。本章的大部分篇幅用于介绍我们如何处理接触和其他约束条件。这种方法是基于我们最近的研究,也是 MuJoCo 所独有的,因此我们花时间对其进行了详细的激励和解释。更多信息可参见下面的论文,

MuJoCo 入门教程(三)Python 绑定
系列文章目录 前言 从 2.1.2 版开始,MuJoCo 附带使用 pybind11 以 C++ 开发的本地 Python 绑定。Python API 与底层的 C API 保持一致。这导致了一些非 Python 代码结构(如函数参数的顺序),但其好处是 API 文档适用于两种语言。 Python 绑定作为 mujoco 包发布在 PyPI 上。这些都
MuJoCo 入门教程(一)
系列文章目录 前言 一、简介 MuJoCo 是多关节接触动力学(Multi-Joint dynamics with Contact)的缩写。它是一个通用物理引擎,旨在促进机器人、生物力学、图形和动画、机器学习以及其他需要快速、准确地仿真铰接结构与环境交互的领域的研究和开发。该引擎最初由 Roboti LLC 开发,2021 年 10 月被 DeepMind
强化学习:MuJoCo机器人强化学习仿真入门(1)
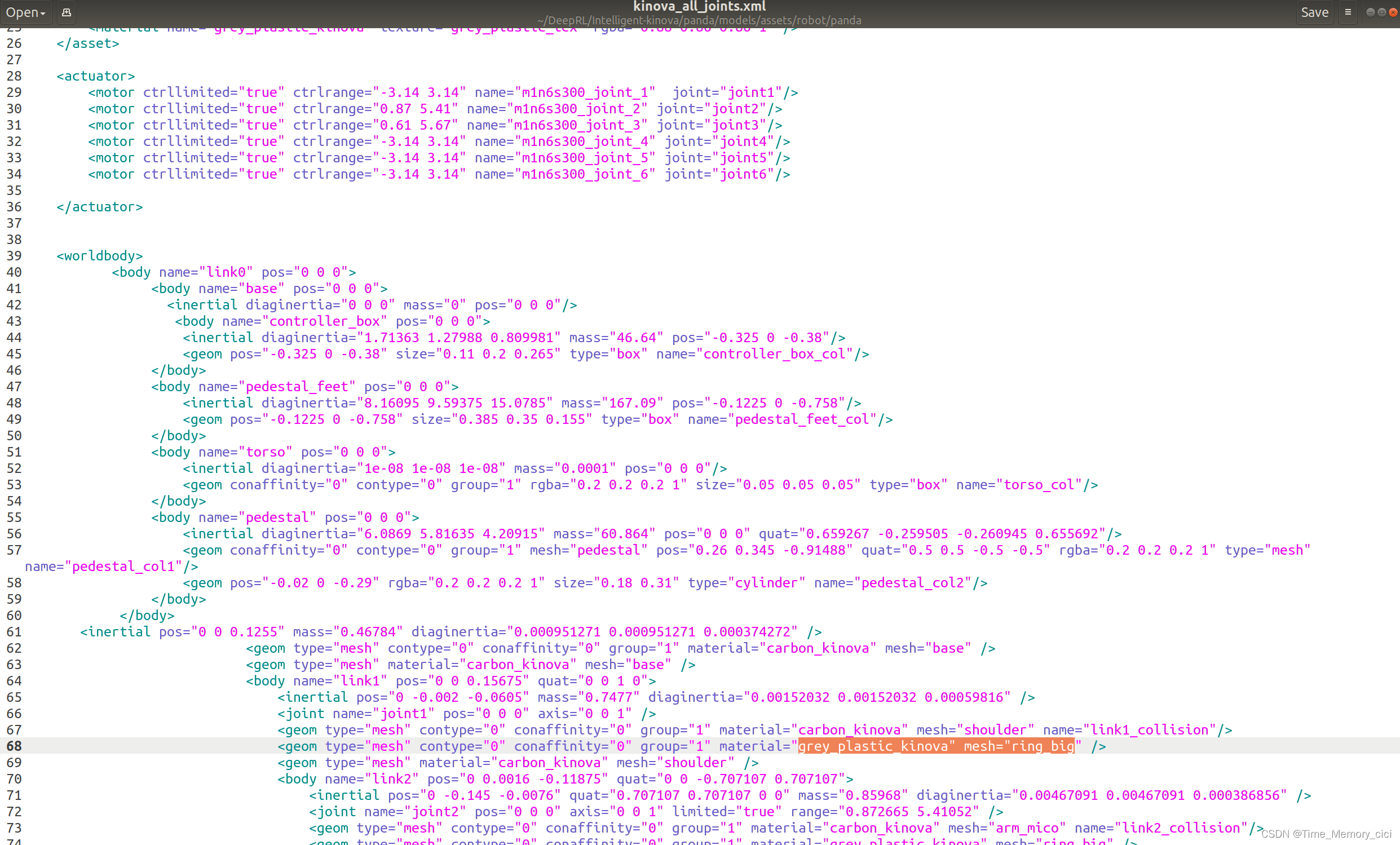
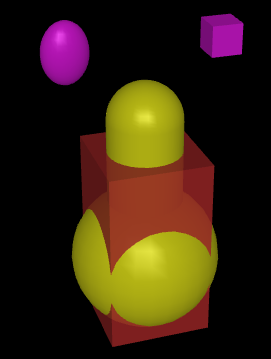
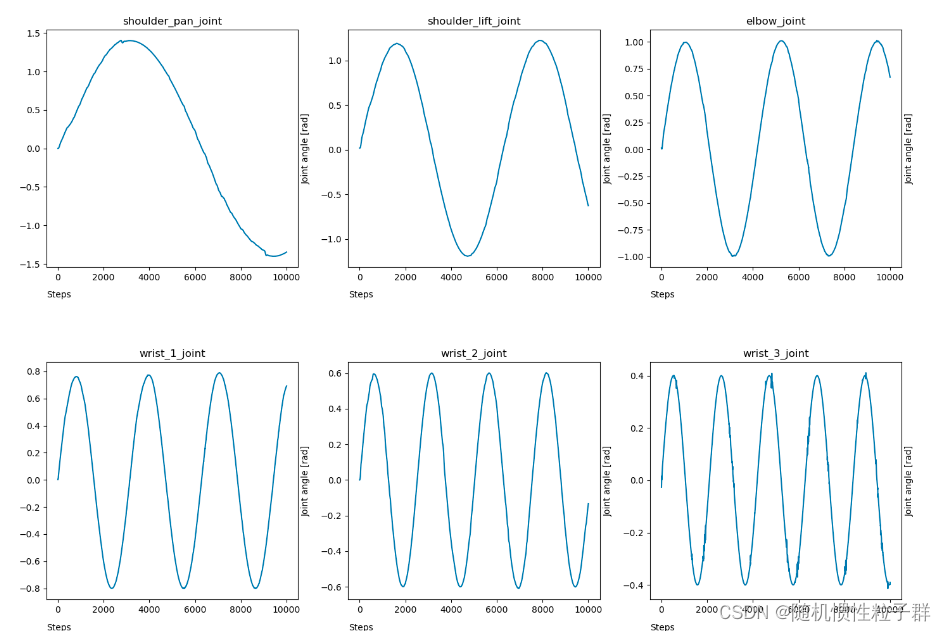
声明:我们跳过mujoco环境的搭建,搭建环境不难,可自行百度 下面开始进入正题(需要有一定的python基础与xml基础): 下面进入到建立机器人模型的部分: 需要先介绍URDF模型文件和导出MJCF格式 介绍完毕,下面开始进行mujoco仿真: 首先将这4个文件复制到.mujoco/mujoco210/bin文件夹中:
强化学习:MuJoCo机器人强化学习仿真入门
声明:我们跳过mujoco环境的搭建,搭建环境不难,可自行百度 下面开始进入正题(需要有一定的python基础与xml基础): 下面进入到建立机器人模型的部分: 需要先介绍URDF模型文件和导出MJCF格式 介绍完毕,下面开始进行mujoco仿真: 首先将这4个文件复制到.mujoco/mujoco210/bin文件夹中:
记录Ubuntu20.04安装mujoco与安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError的解决方案
安装mujoco可以参考如下来链接: Ubuntu20.04安装mujoco: https://blog.csdn.net/qq_47997583/article/details/125400418 安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError: https://blog.csdn.net/m0_38122847/article/

记录Ubuntu20.04安装mujoco与安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError的解决方案
安装mujoco可以参考如下来链接: Ubuntu20.04安装mujoco: https://blog.csdn.net/qq_47997583/article/details/125400418 安装mujoco_py并测试时提示Cython.Compiler.Errors.CompileError: https://blog.csdn.net/m0_38122847/article/
WIN10系统安装gym、mujoco以及Atari
本文涉及在windows10系统下gym、mujoco以及Atari的安装。 系统:win10教育版 python版本:3.6.8 anconda版本:3.5.4 gym版本:0.9.1 mujoco_py版本:0.5.7 mjpro版本:131 第一步:创建conda环境 ctrl+r 输入 cmd 确认 conda create -n py36 python==3.6.
win10安装mujoco一点细节
2 人赞同了该文章 本文参考 浪子:WIN10系统安装gym、mujoco以及Atarizhuanlan.zhihu.com 补充一点细节 还好 github 上有两个 issue 244, 192,说使用python 3.6, mujoco 0.5.7 with the mjpro131 package installed and gym 0.9.1这一整套配置就可以了。我惊喜地发现我
Mujoco以及mujoco_py在win10下的从零开始无脑安装法
感觉大部分blog都是关于linux/macos的,这篇博文来记录一下mujoco以及mujocopy在win10下的安装法吧 1. 下载mujoco 下载网址:https://www.roboti.us/index.html 这里注意一定要下载150的版本。因为对于windows用户,mujoco_py是只支持150的。(标黄部分) win+R CMD打开命令行,输入 mkdir
MuJoCo机器人动力学仿真平台安装与教程
MuJoCo是一个机器人动力学仿真平台,它包括一系列的物理引擎、可视化工具和机器人模拟器等工具,用于研究和模拟机器人的运动和动力学特性。以下是MuJoCo的安装教程: 下载和安装MuJoCo Pro。可以从MuJoCo的官方网站上下载最新版本的安装包。根据操作系统的不同,选择相应的安装包进行下载和安装。 pip install mujoco 安装完成后,启动MuJoCo Pro软件。在软件界面

【Reinforcement Learning】Ubuntu中mujoco210 mujoco_py D4RL安装及错误解决
Ubuntu中mujoco210 mujoco_py D4RL安装及错误解决 本文根据一篇知乎文章链接在此进行配置,记录在配置过程中遇到的一些问题,原文作者的教程很详细,在此对原作者表示感谢~ 直接进行知乎原文的第2.2 有效安装过程(避坑) 2.注意上文中各行代码的作用 原文作者的代码有一点点小问题,我在注释中指出,要注意甄别 **注意/.mujoco是隐藏文件夹,在界面中可以打开显示