mspm0g3507专题

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)具体项目报告
题目:自动行驶小车(H题) 摘要 本项目由微处理器MSPM0G3507,编码器电机驱动,8路灰度传感器指示线巡线单元,MPU6050六轴传感器无线直行单元,OLED显示人机互动单元,红色LED及蜂鸣器声光提示单元构成。系统运行由两部分组成:自动行驶小车的无指示线直行控制部分和有指示线弯道行驶的实时转向控制部分,小车的无指示线直行控制部分,由MPU6050六轴传感器获得小车姿态的偏航角,通过获得

电赛2024年H题智能小车基于MSPM0G3507主控MCU(利用8路灰度加上MPU6050的解决方式)
一.前言 前段时间,激烈的电赛刚刚结束,很荣幸啊,也是十分的不甘心,本次的湖北赛区H题只拿到了一个省二,看最终的排名,在H题中我们离省一也就差几名。但是整个比赛已经过去了,现在不甘与不舍,也没有任何意义了,只有接收这一现实了。 当时我们整个比赛要求一二三都完美完成,要求四能够十分稳定的跑下来但是跑完四圈得花1分30秒,大概是跑十次才死一两次的样子(毕竟比赛,谁也
MSPM0G3507——PWM
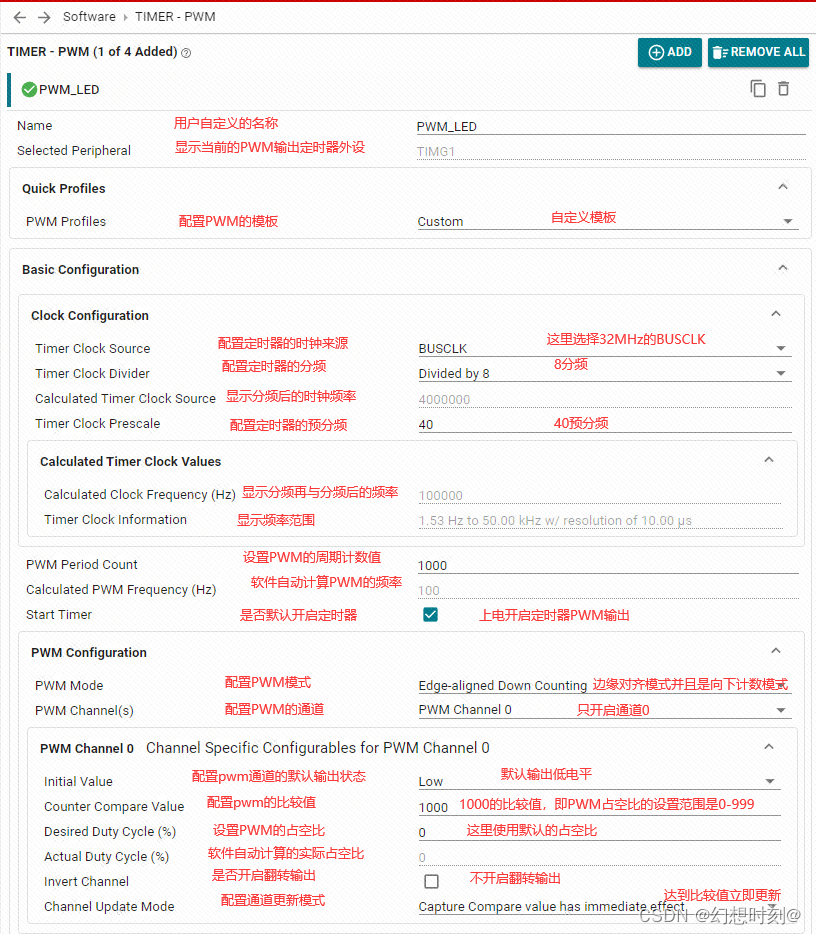
在sysconfig中,左侧可以选择MCU的外设,我们找到并点击TIMER-PWM选项卡,在TIMER-PWM中点击ADD,就可以添加定时器下的PWM外设。 这里设置通道0为100Hz的频率,0%占空比的PWM,周期计数值为1000,比较值也设置为1000,这样的话从1000开始向下计数,每遇到一次1000PWM的状态就翻转一次。

MSPM0G3507——GPIO例程讲解1——input_capture
函数: 参数: 返回值: 主函数代码: #include "ti_msp_dl_config.h"extern volatile uint32_t interruptVectors[];int main(void){SYSCFG_DL_init(); //把所有的LED灯和按键初始化了一遍/** Turn O

MSPM0G3507——定时器简介和功能
分为两种定时器:通用定时器(TIMG)和高级控制定时器(TIMA) 在官方手册中可能还出现TIMX,这里TIMX指的是两者通用的功能。 TIMG概述: TIMG模块由16位和32位自动重新加载计数器组成,由可编程预分频器驱动 用于多次捕获/比较的两个捕获/比较(CC)块、PWM输出和间隔定时。TIMG 具有广泛的事件生成功能,包括计数器溢出、重新加载和捕获/比较操作 各种用例。 TIMG的