mser专题
Opencv2.4.9源码分析——MSER
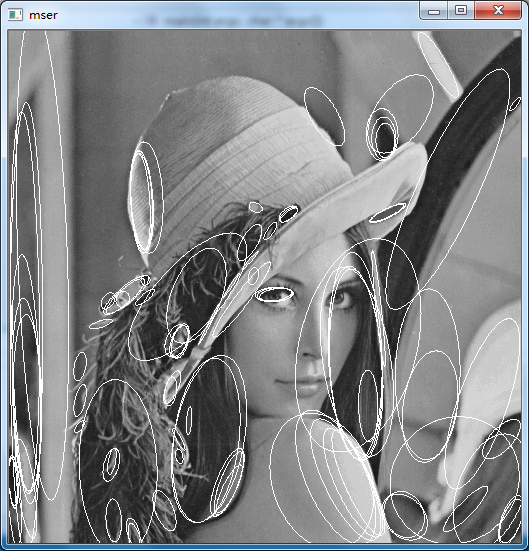
最大稳定极值区域(MSER-Maximally Stable Extremal Regions)可以用于图像的斑点区域检测。该算法最早是由Matas等人于2002年提出,它是基于分水岭的概念。 MSER的基本原理是对一幅灰度图像(灰度值为0~255)取阈值进行二值化处理,阈值从0到255依次递增。阈值的递增类似于分水岭算法中的水面的上升,随着水面的上升,有一些较矮的丘陵会被淹没,如果从天空往

【CV】特征匹配FAST和MSER
特征匹配是计算机视觉领域的重要概念,涉及在图像中寻找关键点和描述符。FAST和MSER是两种常用的关键点检测算法。 FAST (Features from Accelerated Segment Test) FAST算法是一种快速角点检测器。它基于像素强度比较,在一个圆圈内进行强度对比,以检测图像中的关键点。FAST的核心思想是通过比较圆圈内像素的强度差来检测角点。其速度快,适合实时应用。

OpenCV-利用颜色、形态学和最大稳定极值区域MSER实现车牌区域检测
要想提取车牌号,首先要定位车牌区域,本文分别三种方法用,即颜色、形态学和最大稳定极值区域MSER的方法,对车牌区域进行判定。说得是三种方法,其实并无多大的区别。方法一:利用颜色提取车牌区域的思路: 1.求得原图像的sobel边缘sobelMat 2.在HSV空间上通过对色调H、饱和度S、明度V进行约束条件的限制获得图像中满足车牌背景底色的区域,得到图像bw_blue 3.通过对图像中每一个像
MSER最稳定极值区域源码分析
最稳定极值区域介绍 如把灰度图看成高低起伏的地形图,其中灰度值看成海平面高度的话,MSER的作用就是在灰度图中找到符合条件的坑洼。条件为坑的最小高度,坑的大小,坑的倾斜程度,坑中如果已有小坑时大坑与小坑的变化率。 上图展示了几种不同的坑洼,根据最小高度,大小,倾斜程度这些条件的不同,选择的坑也就不同。 上图展示了最后一个条件,大坑套小坑的情况。根据条件的不同,选择也不同。 以上

MSER仿射不变特征匹配算法
MSER原理简述 个人博客 OpenCV实践之MSER仿射匹配算法 已更新讲述MSER仿射匹配算法代码 区域检测(Region Detection)方法是根据图像中具有某种同类性质的像元进行分类(例如相同像素值大小的点),然后把具有相同性质的像元合并成区域,实现区域的检测即图像分割。MSER(Maximally Stable Extremal Regions最大极值区域检测)方法与一般

mser场景文字检测及筛选
发现很多人都用mser,swt等进行场景文字的检测,最近也去实现了一下,虽然swt较新的算法,但实现过程中传统的mser算法反而更稳定,速度也会更快,可能是我还没有完全领会swt的精髓。ps:暂时只做水平及水平倾斜的文字 demo http://download.csdn.net/detail/u013293750/9699124 场景文字检测,tesseractocr识别