msckf专题

MSCKF第6讲:状态与协方差
MSCKF中状态与协方差 文章目录 MSCKF中状态与协方差1 状态2 IMU状态与噪声协方差2.1 相关定义2.2 运动方程—IMU连续噪声协方差2.3 误差状态协方差矩阵 3 cam状态 1 状态 msckf_vio.h 状态 StateServer state_server; 注意到,实际上imu_state和cam_states近似同步,并不是所有的imu数据都会
ROS kinetic 运行s_msckf和 vins_fusion
s_msckf:采用多状态约束的双目vio系统 !!!注意imuCallback:接收IMU数据,将IMU数据存到imu_msg_buffer中,这里只会利用开头200帧IMU数据进行静止初始化,不做其他处理。featureCallback:接收双目特征,进行后端处理。利用IMU进行EKF Propagation,利用双目特征进行EKF Update。静止初始化(initializeGravi
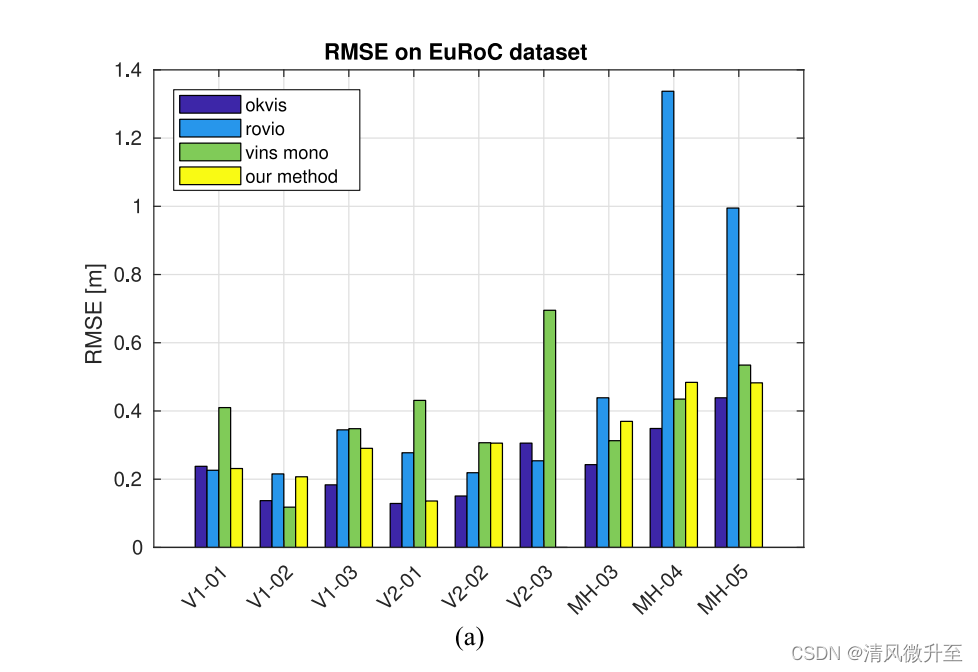
msckf-vio 跑Euroc数据集,并用evo进行评估
所需材料: Euroc数据集主页:https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasetsevo评估工具代码:https://github.com/MichaelGrupp/evo向msckf-vio中添加保存位姿的代码,可参考https://blog.csdn.net/xiaoxiaoyikesu/