ky专题
KY-RTI分布仿真技术:第十章 Python程序设计
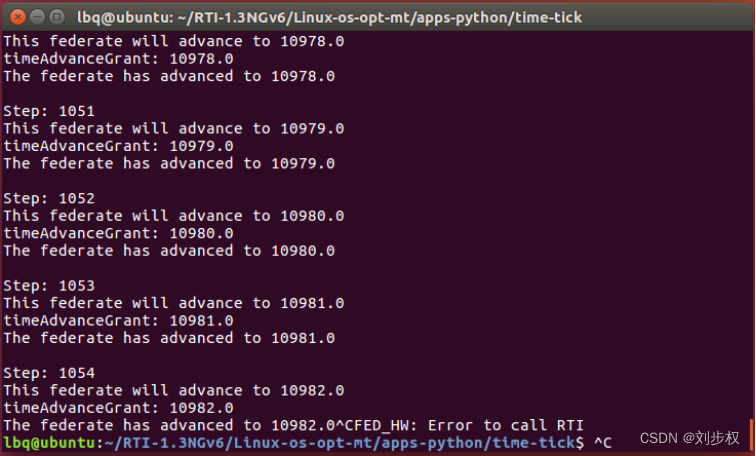
本章讲述了如何基于Python设计聊天程序和时间管理程序,两个程序都是控制台程序,采用了与Java类似的设计风格。聊天程序相当于6.1节的Java聊天程序;时间管理程序相当于6.2节的Java程序。对于不同的程序设计语言而言,基于HLA/RTI设计仿真应用的方法都差不多,其关键在于RTI软件能否支持相应程序设计语言的开发,用户只需要关心一下调用接口即可,通过调用接口可以设计形式多样的程序。与C++

【雕爷学编程】Arduino动手做(20)—KY-017 水银开关重心倾斜传感器模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手试试做实验,不管成功与否,都会记录下来—小小的进步或是搞不定的问题,希望能够抛砖引玉。 【Arduino】108种传感器模块系列实验(资料+代码+图形+仿真) 实验二十:水银开关模

KY-RTI分布仿真技术:附录3 国产化(操作系统+CPUs)
以操作系统和CPU为代表的国产化是当前仿真系统实现的必然趋势。本章以聊天程序为例,展示了KY-RTI在多种国产操作系统和国产CPU上的运行结果。聊天程序是一个入门程序,本身比较简单,不追求界面的美观。相信,很多人还没有见过各类国产操作系统的运行环境,本章就来揭示一下庐山真面目吧。 12.1“银河麒麟”+“飞腾CPU” 下图的系统环境为:银河麒麟操作系统和飞腾CPU。

KY-RTI分布仿真技术:附录2 大联邦(构建1000个成员的HLA/RTI仿真系统)
基于当前的RTI构建1000个以上成员的仿真系统在一些人看来似乎是极具挑战性的一个问题。如果你对当前的计算机技术、网络技术、仿真技术真正了解的话,其实构建这样的一个大规模仿真系统是完全可行的。本章以聊天程序为例,介绍了基于KY-RTI构建1000个仿真成员的两种方法:基于单个RTI服务器的大联邦;基于桥接程序实现多个RTI服务器的大联邦。从HLA的概念来讲,每个RTI服务器及其所有仿
KY-RTI分布仿真技术:第八章 Visual C#程序设计
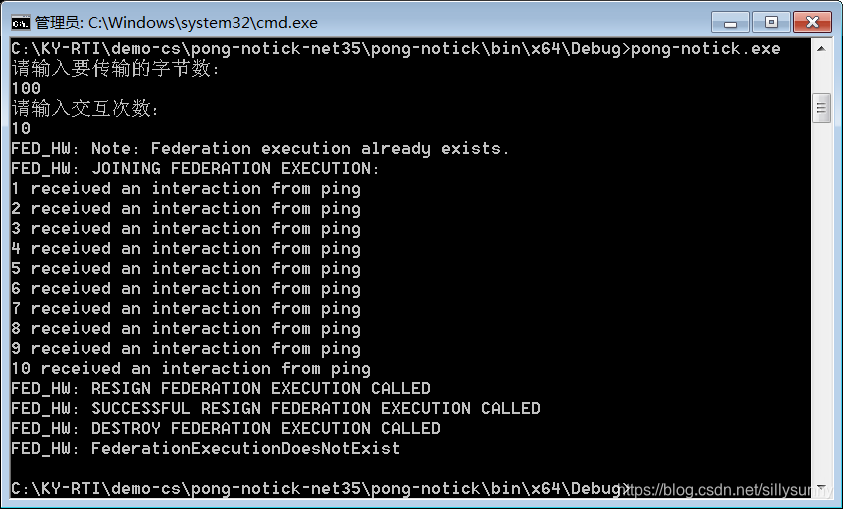
第八章 Visual C#程序设计 本章讲述如何基于Visual C#设计ping、pong程序。本质上是对上一章Visual C++程序的一次成功移植。对于不同的程序设计语言而言,基于HLA/RTI设计仿真应用的方法都差不多,而关键在于RTI软件能否支持相应程序设计语言的开发,用户关心一下调用接口即可,通过调用接口可以设计形式多样的程序。与C++调用接口的一个显著区别在于句柄和时

【雕爷学编程】Arduino动手做(11)---KY-036金属触摸传感器模块之特点、原理、接口说明与实验所需硬件清单
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手试试多做实验,不管成功与否,都会记录下来——小小的进步或是搞不掂的问题,希望能够抛砖引玉。 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验十一:

用商空间做一些能够想象的拓扑空间:x=ky的n维的实摄影空间
用商空间做一些能够想象的拓扑空间: 对 于 集 合 X , 在 其 上 定 义 拓 扑 , 定 义 等 价 关 系 在 X / ∼ = { x ˉ ∣ x ∈ X } 上 定 义 拓 扑 , 需 满 足 X / ∼ 中 的 开 集 在 π − 1 映 回 去 仍 是 X 中 开 集 。 对于集合X,在其上定义拓扑,定义等价关系\\ 在X/\sim=\{\bar x|x\in X\}上定义拓扑,\