kinematics专题

CCD IK (Inverse Kinematics) 的说明
http://www.ryanjuckett.com/programming/animation/21-cyclic-coordinate-descent-in-2d
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
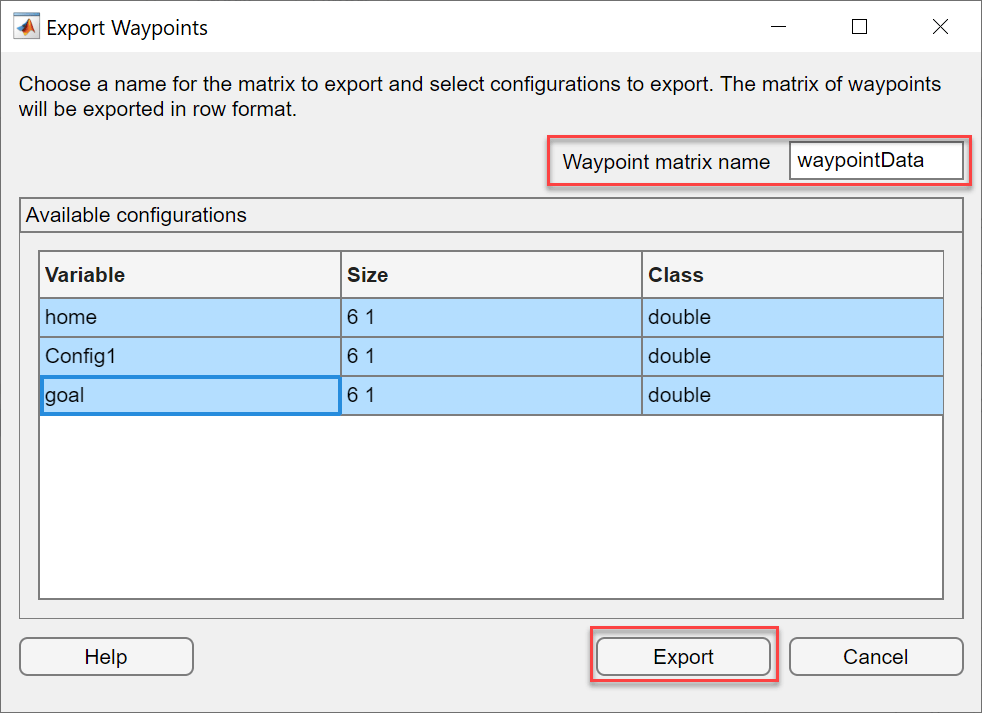
系列文章目录 前言 一、简介 通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆运动学求解器和约束条件。创建关节配置并导出航点。将求解器设置、约束和关节配置导出到 MATLAB® 工作区。 二、打
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介 通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆运动学求解器和约束条件。创建关节配置并导出航点。将求解器设置、约束和关节配置导出到 MATLAB® 工作区。 二、打
![MoveIt教程[19]:IKFast Kinematics Solver](/front/images/it_default2.jpg)
MoveIt教程[19]:IKFast Kinematics Solver
在本节中,将介绍为MoveIt配置IKFast插件。 一.What is IKFast 来自Wikipedia: IKFast,机器人运动学编译器,是Rosen Diankov的OpenRAVE运动规划软件中提供的一个强大的逆运动学求解器。与大多数逆运动学求解器不同,IKFast可以解析求解任何复杂运动学链的运动学方程,并生成语言特定的文件[如C++]供以后使用。最终的结果是非常稳定的解决方案,可
【COMP329 LEC4 Locomotion and Kinematics】
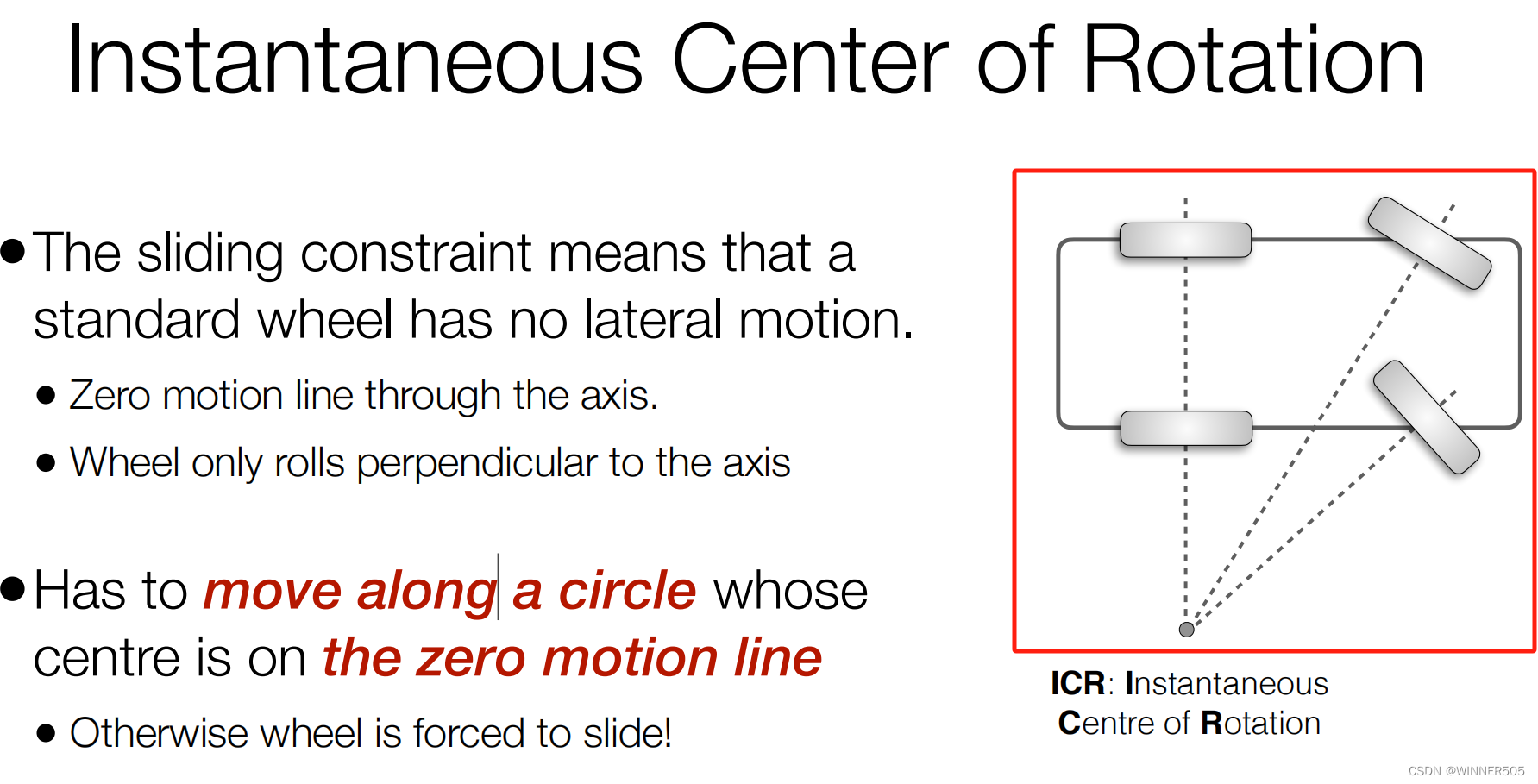
Only for the Test 1 which include 4.2 4.3 4.4 Locomotion and Kinematics 运动和运动学 (4.2) Part 2: Wheeled Motion 1. Wheeled Robots a. 省略控制双腿需要的计算复杂度 b. 只限于easy terrain (地形) c. 不平坦uneven 不规则irregu