jacobian专题

pytorch教程之自动求导机制(AUTOGRAD)-从梯度和Jacobian矩阵讲起
文章目录 1. 梯度和Jacobian矩阵2. pytorch求变量导数的过程 1. 梯度和Jacobian矩阵 设 f ( x ) ∈ R 1 f(x)\in R^1 f(x)∈R1是关于向量 x ∈ R n x\in R^n x∈Rn的函数,则它关于 x x x的导数定义为: d f ( x ) d x : = [ ∂ f ( x ) ∂ x i ] ∈ R n (1-
七、VINS-mono 代码解析——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化
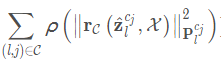
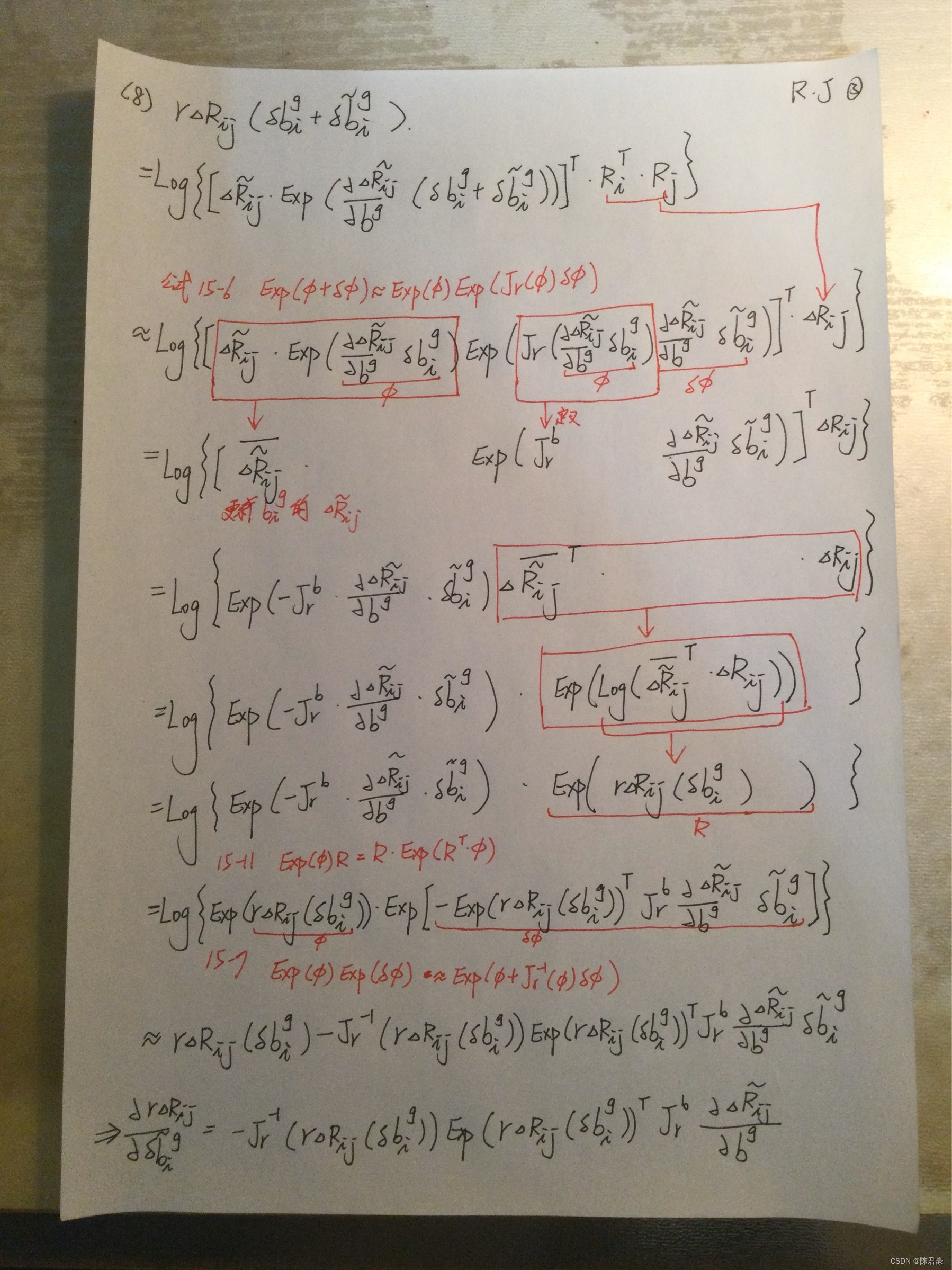
文章目录 前言紧耦合后端非线性优化系统框架一、VIO中的状态向量与代价函数1、需要优化的状态向量:2、目标函数为:二、视觉约束1.视觉重投影误差residual2、优化变量3、Jacobian4、协方差三、IMU约束1、残差:2、优化变量:3、IMU测量残差公式推导4、残差对状态量的Jacobian5、残差对状态量的协方差四、基于舒尔补的边缘化1、论文部分2、基本公式3、舒尔补4、marg后

VINS-Mono 理论详细解读——紧耦合后端非线性优化 IMU+视觉的残差residual、Jacobian、协方差、基于舒尔补的边缘化
预积分和后端优化IMU部分** https://blog.csdn.net/weixin_44580210/article/details/93377806 本讲是VINS最核心部分了,前面经历了 1)视觉跟踪feature_tracker、IMU预积分integrationBase类; 2)初始化中SFM纯视觉估计滑动窗中所有帧的位姿和3D路标点深度、SFM与IMU预积分松耦合对齐求解初始化

雅可比矩阵(Jacobian Matrix)
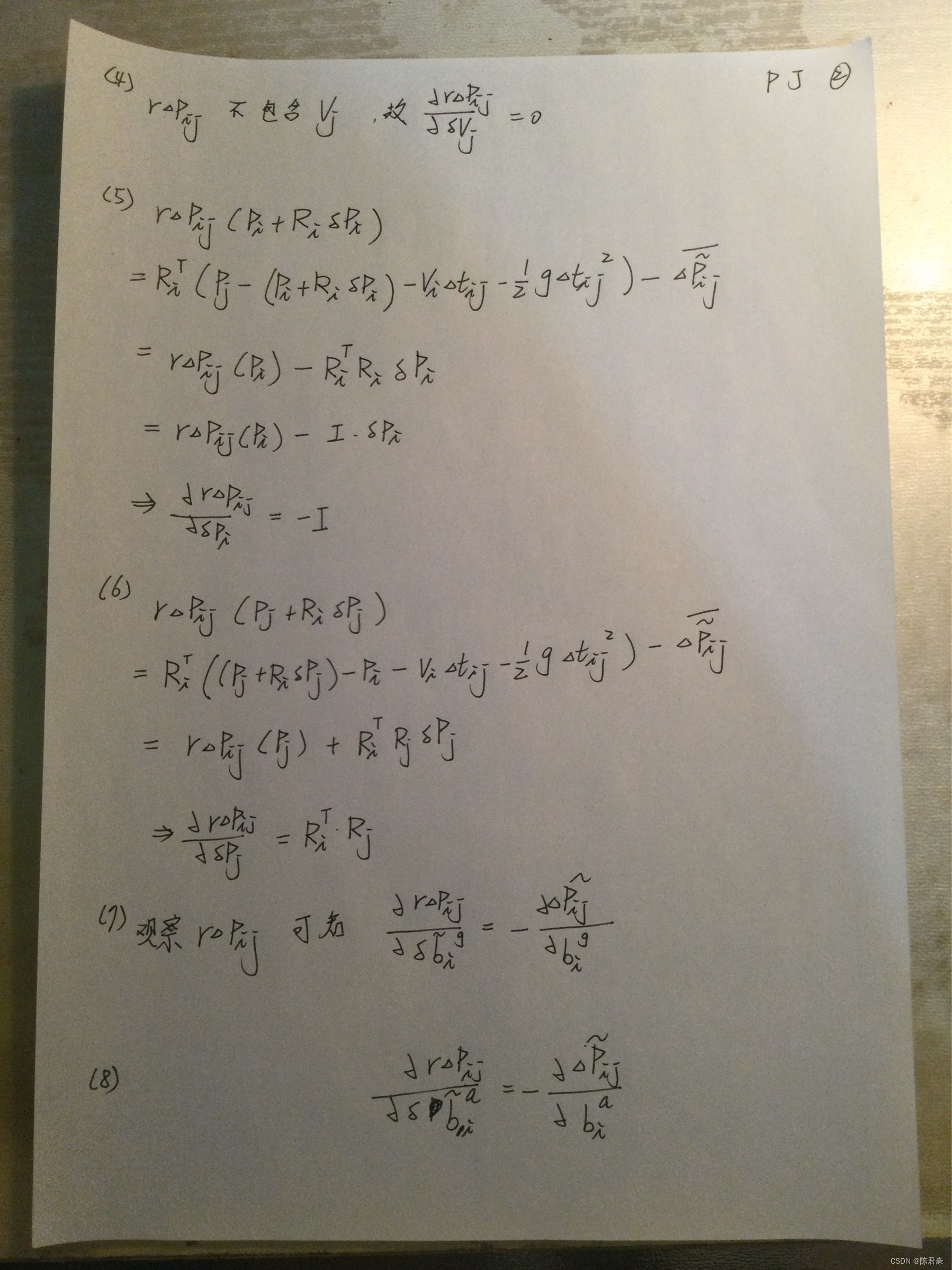
假设给定一个从n维欧式空间到m维欧式空间的变换: 雅可比矩阵就是将一阶偏导数排列成一个m行、n列形式的矩阵,记作: 举一个例子: 雅可比矩阵等于: