halcon3d专题

10.Halcon3D点云和MESH的相互转换
1.实现效果 这个案例主要是想告诉我们,如何在点云数据(全是点)和MESH(网格数据)中转换,理论上说可以点云数据可以看作的离散的,而MESH网格数据可以看作是连续的。 上图展示了三个(其实是四个)空间中的3d对象,左边第一个是一个立方体,经过降采样之后的点云,中间的是立方体四个角点的点云,右边的是基于四个角点的点云生成的MESH网格对象。 整个案例就在告诉我们,点云和MESH网格数

Halcon3D表面平面度检测-平面差值法
//倾斜平面矫正https://blog.csdn.net/m0_51559565/article/details/137146179 前言 通常我们对表面平面度进行检测时,通常使用2种方式。1:通过大卷积核的高斯滤波进行拟合平面,然后求取拟合平面与3D模型间的点间的距离。2:通过平面矫正,将被测试平面矫正到水平面后,对平面以上和平面以下的点云进行筛选。(关于平面矫正,可以点击文章开头链接
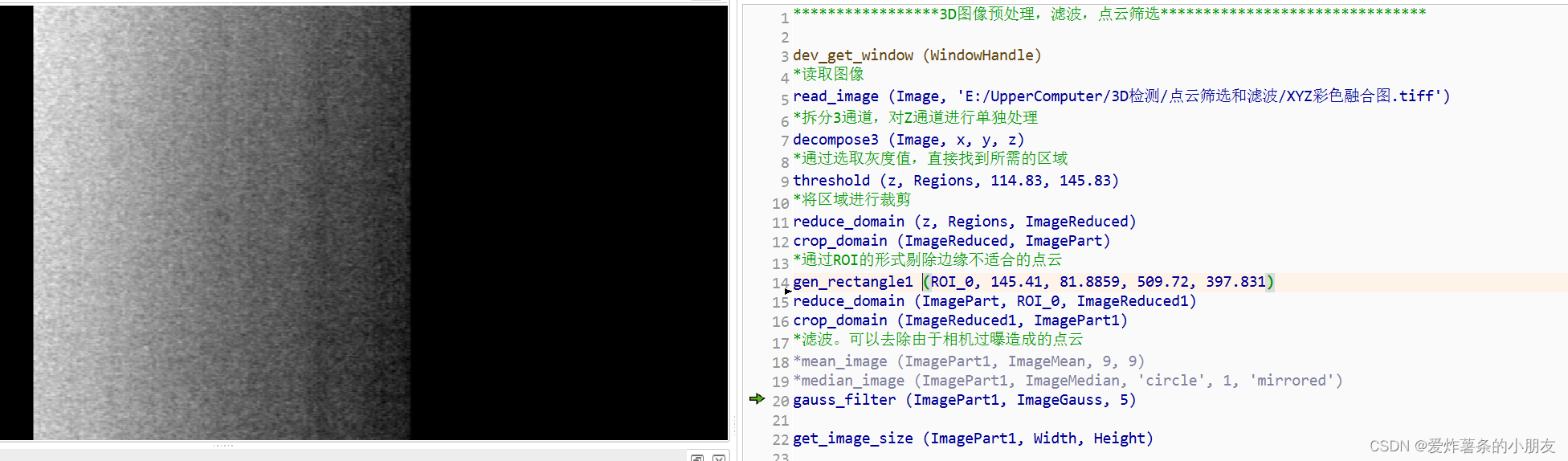
Halcon3D篇-3D预处理,滤波,点云筛选
前言 由于3D相机采集到的数据通常通过Tiff格式的深度图进行显示或者保存。 深度图与模型的互转可以访问另一篇博客:https://blog.csdn.net/m0_51559565/article/details/135362674 关于3D相机的数据采集,可以访问我们另一篇关于LMI3D相机SDK的二次开发: https://blog.csdn.net/m0_51559565/articl