grasp专题

YOLO前篇---Real-Time Grasp Detection Using Convolutional Neural Networks
论文地址:https://arxiv.org/abs/1412.3128 1. 摘要 比目前最好的方法提高了14%的精度,在GPU上能达到13FPS 2. 基于神经网络的抓取检测 A 结构 使用AlexNet网络架构,5个卷积层+3个全连接层,卷积层有正则化和最大池化层网络结构示意图如下 B 直接回归抓取 最后一个全连接层输出6个神经元,前4个与位置和高度相关,另外2个用来表示方向

【软件安装11】抓取姿态检测 Grasp Pose Detection (GPD) 与 gpd_ros 安装Ubuntu18.04
文章目录 一、GPD 教程1.1、依赖要求1.2、安装GPD1.3、使用GPD1.3.1 为点云文件生成抓取 1.4、参数1.5、可视1.6、神经网络的输入通道1.7、CNN框架1.8、Network Training1.9、抓取图像/描述符1.10、故障排除提示 二、gpd_ros 教程2.1 安装gps_ros流程:2.2 使用gpd_ros 抓取姿态检测(GPD
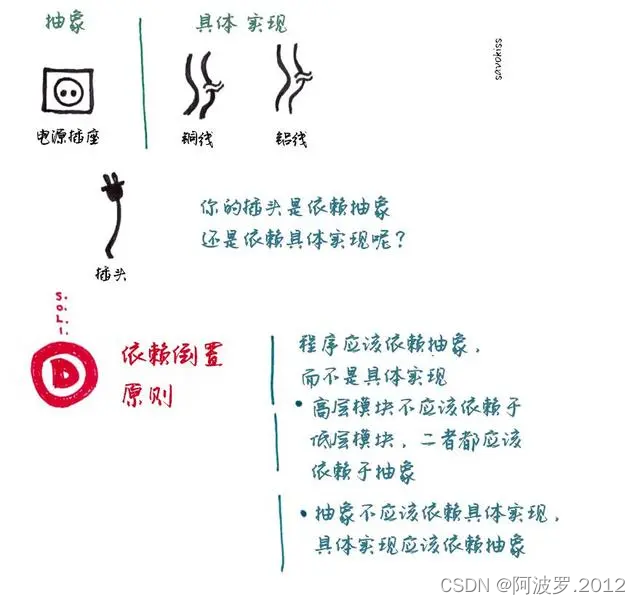
GRASP 、SOLID 与 GoF 设计模式
一、GRASP GRASP:通用职责分配软件设计模式(General Responsibility Assignment Software Patterns),其主要思想是基于单一职责设计软件对象。 思考软件对象设计以及大型构件的流行方式是,考虑其职责、角色和协作。这是被称为职责驱动设计(RDD)的一部分。 在RDD中,我们认为软件对象具有职责,即对其所作所为

九大GRASP类和设计模式
面向对象设计原则是一组指导软件设计的原则,其中GRASP(General Responsibility Assignment Software Patterns)是其中的一部分。这些原则帮助设计者确定类应该负责执行哪些职责,以及如何分配这些职责。在下面的文档中,我们将详细介绍九大GRASP原则,并提供Java语言的代码示例,以便更好地理解这些原则的应用。 1. Information Exper
![Robot Grasp[Code with paper]](/front/images/it_default.gif)
Robot Grasp[Code with paper]
题目/摘要重点 Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects 使用合成数据为机器人训练深度神经网络 操纵有望获得几乎无限数量的预标记 训练数据。合成数据一直在弥合所谓的现实差距,因此 在合成数据上训练的网络在暴露于现实世界时可以正常运行 数据。我们在 6-DoF 位姿估计的背景下探讨

飞行机器人——宾夕法尼亚大学GRASP实验室
太强大了,自动飞行,寻找路线,自组织,可以应用到很多地方,使用了摄像头,激光和雷达做传感器,不罗嗦了,直接看吧。 宾夕法尼亚大学GRASP实验室(General Robotics, Automation, Sensing and Perception )飞行机器人。 转载于:https://www.cnblogs.com/yuyan/archive/2012/03/04/23790

文献阅读记录3-Real-Time Grasp Detection Using Convolutional Neural Networks
原标题: Real-Time Grasp Detection Using Convolutional Neural Networks 基于卷积神经网络的实时抓取检测 原作者: Joseph Redmon1, Anelia Angelova 论文链接:下载地址http:// https://link.zhihu.com/?target=https://pjreddie.