galactic专题
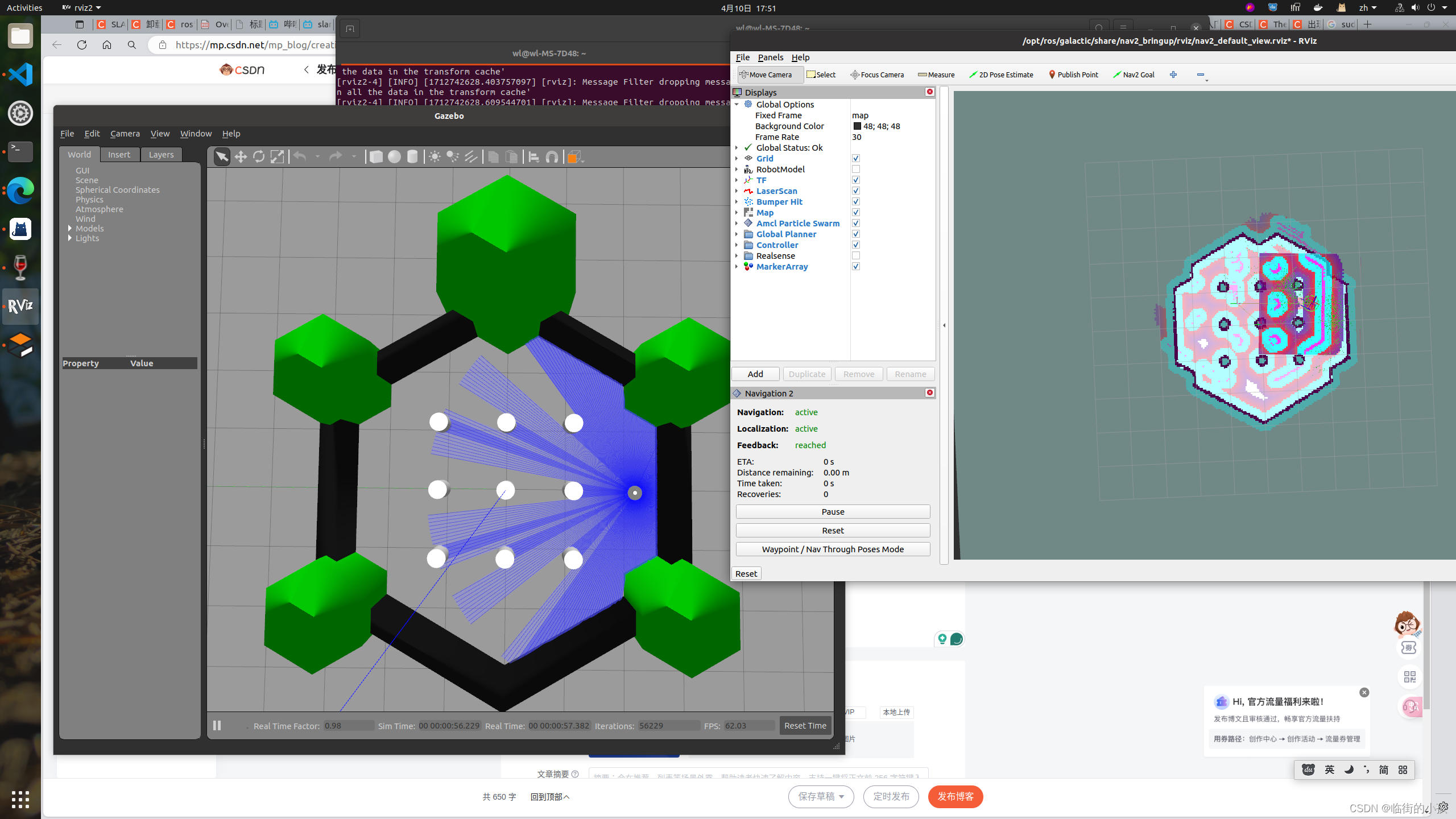
NAV2 ros galactic安装教程
sudo apt install ros-galactic-gazebo-* 这个必须下载 sudo apt-get install -y ros-galactic-rmw* 这个也是 使用操作系统中的包管理器安装 Nav2 包: sudo apt install ros-galactic-navigation2sudo apt install ros-gal

安装ROS2 Galactic 安装教程(亲测有效!)
努力变得更有意义 最近给Jetson AGX Orin安装ROS2,踩了一堆的坑,最终用了学弟找到了一个非常好用的教程,在这里记录一下! 首先Orin是ARM架构的,所以换源不能和之前Ubuntu一样的操作去换源(虽然下面用到的这个教程我感觉不需要自己设置也可以) Jetson AGX Orin 换源 (非Orin玩家可以直接跳过)这里直接放上了网上随便都能找到的一般的教程
ROS2 galactic生成的bag包里的MarkerArray在humble下播放不正常
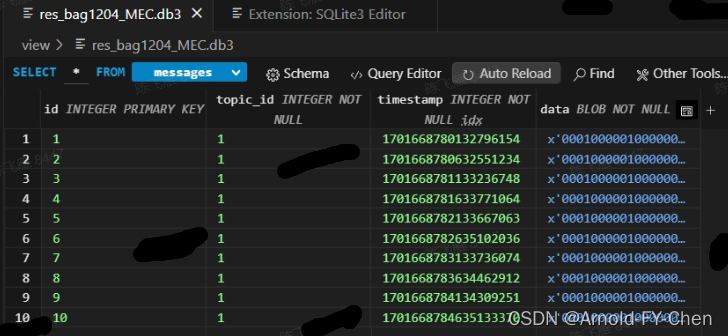
近期发现ROS2 galactic下生成的bag包在humble下回放时使用rviz可视化,bag里的点云可以正常看到,但是使用Marker和MarkerArray画的box却死活看不到,感觉很纳闷,看网上有人报告说foxy下生成的bag包在galactic下播放会报SQL错误,推断ROS2不同版本之间关于bag的实现可能有一些差异导致不兼容。 考虑道ROS2生成的bag包实际上是个sqlite
ROS2 galactic生成的bag包里的MarkerArray在humble下播放不正常
近期发现ROS2 galactic下生成的bag包在humble下回放时使用rviz可视化,bag里的点云可以正常看到,但是使用Marker和MarkerArray画的box却死活看不到,感觉很纳闷,看网上有人报告说foxy下生成的bag包在galactic下播放会报SQL错误,推断ROS2不同版本之间关于bag的实现可能有一些差异导致不兼容。 考虑道ROS2生成的bag包实际上是个sqlite