frames专题
vivado Aurora 8B/10B IP核(3)-Aurora 8B/10B 帧(Frames)
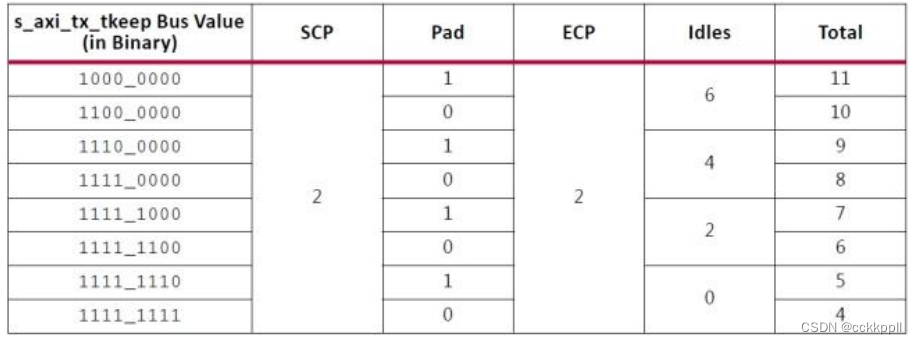
TX 子模块将每个接收的用户帧通过 TX 接口转换为 Aurora 8B / 10B 帧。 帧开始(SOF)通过 在帧开始处添加 2 字节的 SCP 代码组来指示。 帧结束(EOF)是通过在帧的末尾添加一个 2 字节的信道结束通道协议(ECP)码组来确定的。 数据不可用时插入空闲代码组。 代码组是 8B / 10B 编码字节对,所有数据都作为代码组发送,因此具有奇数个字节的用户帧具有称为 PA

ROS noetic view_frames TypeError: cannot use a string pattern on a bytes-like object
ROS noetic + Ubuntu20.04报错: mc@ubun:~$ rosrun tf view_framesListening to /tf for 5.0 secondsDone Listeningb'dot - graphviz version 2.43.0 (0)\n'Traceback (most recent call last):File "/opt/ros/no

Java字节码中的Stack Map Frames特性简介
Java字节码中的Stack Map Frames特性是Java 6引入的,当时是可选使用的。但是从Java 7开始,字节码默认使用该特性。 Stack Map Frames特性的主要目的是在字节码指令中跟踪局部变量表的类型、操作数的类型。 因为字节码在编译时已经加入了类型的信息,所以在JVM运行时加载字节码的时候,对字节码的验证能够更快速。 但是该特性的引入导致了一系列操作Java字
PowerMock的java.lang.VerifyError: Inconsistent stackmap frames at branch target异常分析
使用PowerMock进行单元测试时,要测试如下构造函数: public FileSourcePc(Resource resource){...} 执行测试的过程中,每次运行到这里就会抛出如下异常: java.lang.VerifyError: Inconsistent stackmap frames at branch target 126Exception Details:Locat

JVM中栈的frames详解
文章目录 简介JVM中的栈FrameLocal Variables本地变量Operand StacksDynamic Linking动态链接方法执行完毕 简介 我们知道JVM运行时数据区域专门有一个叫做Stack Area的区域,专门用来负责线程的执行调用。那么JVM中的栈到底是怎么工作的呢?快来一起看看吧。 JVM中的栈 小师妹:F师兄,JVM为每个线程的运行都分配了一个栈
Window frames[]集合
功能:frames[]是窗口中所有命名的框架组成的数组。这个数组的每个元素都是一个Window对象,对应于窗口中的一个框架。 语法:window.frames 浏览器窗口中每个定义的框架都是frames[]数组中的元素。 假设ifr 是一个以存在的 iframe 的 ID 和 NAME 值: 获取iframe的方法有: document.getElemen

传统蓝牙RFCOMM多路控制帧(MULTIPLEXOR FRAMES)介绍
零. 概述 本文章主要讲下蓝牙RFCOMM协议多路控制通道(MULTIPLEXOR FRAMES),包括一下几种 • PN—DLC parameter negotiation. • Test—Checks communication link. • FCon / FCoff—Aggregate flow control on all connections. • MSC—Modem st
![[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames](https://img-blog.csdnimg.cn/direct/e51d3ce1ff354bd980f96042e7092e47.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames 1.Instantanenous Velocity of Rotating Frames2.Instantanenous Velocity of M

Error: xAxis “0“ not found ▶ 14 stack frames were collapsed.
Error: xAxis "0" not found ▶ 14 stack frames were collapsed. 错误日志 echart错误原因 var echarts = require('echarts'); 官方示例
0032【Edabit ★☆☆☆☆☆】【每秒帧数】Frames Per Second
0032【Edabit ★☆☆☆☆☆】【每秒帧数】Frames Per Second algorithms language_fundamentals math numbers Instructions Create a function that returns the number of frames shown in a given number of minutes for a c

0032【Edabit ★☆☆☆☆☆】【每秒帧数】Frames Per Second
0032【Edabit ★☆☆☆☆☆】【每秒帧数】Frames Per Second algorithms language_fundamentals math numbers Instructions Create a function that returns the number of frames shown in a given number of minutes for a c

ROS2可视化TF树方法view_frames.py
大家好,我是小鱼,欢迎关注小鱼的个人微信公众号《鱼香ROS》,每天获取机器人技术学习新姿势! 在ROS2中我们如何才能看到tf树呢?这里就需要一个工具了,默认安装ROS2的时候已经安装了的,没有安装的可以使用下面这个命令行安装 sudo apt install ros-foxy-tf2-tools 接着我们就可以使用这个工具来可视化ROS2的tf树 ros2 run tf2_tools
![[已解决] pycharm debug时一直显示collecting data或者Frames are not available](https://img-blog.csdnimg.cn/9cf9f5ffcc8542e9b0bad16629f3c837.png)
[已解决] pycharm debug时一直显示collecting data或者Frames are not available
问题描述 如题,在pycharm中debug时一直显示collecting data或者Frames are not available。 参考文献 参见博客:解决PyCharm调试查看变量时一直显示collecting data并报错Timeout waiting for response且看不到任何内容 解决方法 在PyCharm,打开Setting界面,在如下设置项中勾选“Geve