findcirclesgrid专题
OpenCV中的圆形标靶检测——findCirclesGrid()(三)
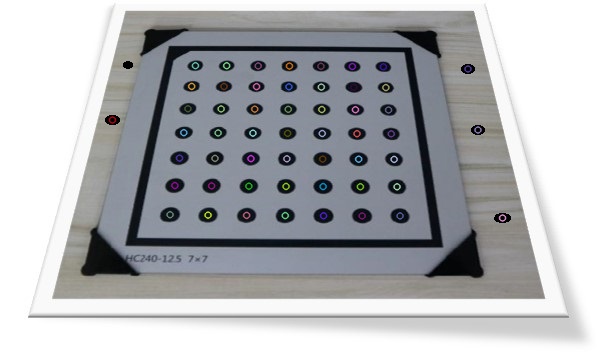
前面说到cv::findCirclesGrid2()内部先使用SimpleBlobDetector进行圆斑检测,然后使用CirclesGridClusterFinder算法类执行基于层次聚类的标靶检测。如下图所示,由于噪声的影响,SimpleBlobDetector检出的标靶可能包含噪声。 而CirclesGridClusterFinder算法类会执行基于

OpenCV中的圆形标靶检测——findCirclesGrid()(一)
如前所述,OpenCV中可以使用findCirclesGrid()实现圆形标靶的检测,该函数的计算流程分为1)斑点形状的检测,和2)基于规则的斑点形状的过滤与定位。第一步将类似圆斑形状的区域检测出来,但可能存在一些误检测的噪声,第二步则利用圆斑的分布规则(M*N排列)进行进一步的过滤,以抑制噪声的影响。 在前面的章节中我们已经介绍了第一步中使用到的SimpleBl