esvio专题
vslam论文24:ESVIO: 基于事件相机的双目VIO(RAL 2023)
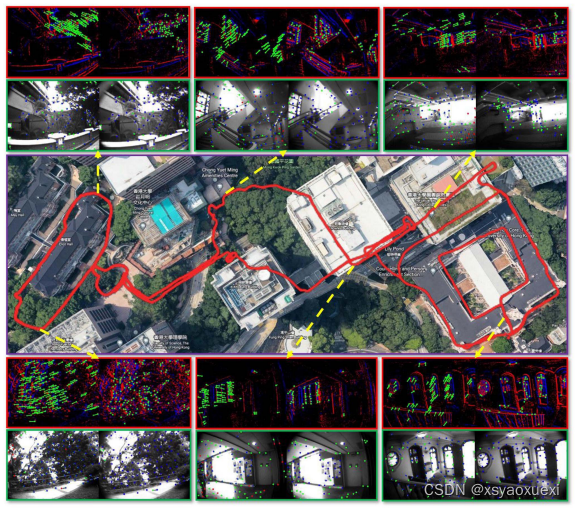
摘要 异步输出低延迟事件流的事件相机为具有挑战性的情况下的状态估计提供了很大的机会。尽管近年来基于事件的视觉里程测量技术得到了广泛的研究,但大多数都是基于单目的,而对立体事件视觉的研究很少。在本文中,我们介绍了ESVIO,这是第一个基于事件的立体视觉惯性里程计,它利用了事件流、标准图像和惯性测量的互补优势。我们建议的pipeline包括ESIO(纯基于事件的)和ESVIO(带有图像