drone专题
研发效能DevOps: OpenEuler 部署 drone 持续集成平台
目录 一、实验 1.环境 2.OpenEuler 部署 drone 持续集成平台 二、问题 1.drone登录失败 一、实验 1.环境 (1)主机 表1 主机 系统架构版本IP备注LinuxopenEuler22.03 LTS SP2 192.168.204.145(动态) 192.168.204.141(静态) 192.168.204.142(静态) MyS
ROS下AR.Drone 2.0相机标定
一.所需要的包:(1)ardrone_autonomy 下载地址:https://github.com/AutonomyLab/ardrone_autonomy 这是AR.Drone 2.0在ROS下运行的底层驱动的包 (2)image_pipeline 下载地址:https://github.com/ros-perception/image_pipeline 这是ROS下用于标定相机的
容器方式下的轻量仓库与CI 使用方案:Gitea + Drone 基础篇
容器方式下的轻量仓库与CI 使用方案:Gitea + Drone 基础篇 按照前篇文章所提,本篇将聊聊如何搭建使用 Gitea 和 Drone。因为内容过多,这个内容我计划拆为多篇来讲述,本篇先聊聊如何搭建使用。 写在前面 为了方便配置域名、证书、以及后续潜在的动态扩容,我们可以搭配 Traefik 一起使用,让 Drone 和 Gitea 都只专注于 CI 和 代码存储相关功能,将“加密证

docker 搭建drone + gitee 的CI/CD
准备 创建 OAuth 应用程序 创建一个 Gitee OAuth 应用程序。Consumer Key 和 Consumer Secret 用于授权访问 Gitee 资源。 授权回调 URL 必须与以下格式和路径匹配,并且必须使用您的确切服务器方案和主机。 应用主页填写 http://111.111.121.189:8793 应用回调地址填写 http://111.111.121
Cross-Drone Transformer Network for Robust Single Object Tracking论文阅读笔记
Cross-Drone Transformer Network for Robust Single Object Tracking论文阅读笔记 Abstract 无人机在各种应用中得到了广泛使用,例如航拍和军事安全,这得益于它们与固定摄像机相比的高机动性和广阔视野。多无人机追踪系统可以通过从不同视角收集互补的视频片段,为目标提供丰富的信息,特别是当目标在某些视角中被遮挡或消失时。然而,在多无人

【论文解读】TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone
Abstract 存在问题 由于无人机会在不同的高度飞行,物体的尺度变化剧烈,这给网络的优化带来了负担。高速和低空飞行对排列密集的物体带来了运动模糊,这对物体的区分带来了巨大挑战。 文章提出的解决方法 增加一个检测头来检测不同规模的对象用Transformer Prediction Heads 来替代原先的检测头用CBAM来寻找具有密集对象的场景中的注意区域除了以上三点,还使用了一些
【Docker】python flask 项目如何打包成 Docker images镜像 上传至阿里云ACR私有(共有)镜像仓库 集成Drone CI
一、Python环境编译 1、处理好venv环境 要生成正常的 requirements.txt 文件,我们就需要先将虚拟环境处理好 创建虚拟环境(可选): 在项目目录中,你可以选择使用虚拟环境,这样你的项目依赖将被隔离在一个独立的环境中。可以使用以下命令创建虚拟环境: python -m venv venv 1.1、然后激活虚拟环境: 在 Windows 上: venv\
【Docker】python flask 项目如何打包成 Docker images镜像 上传至阿里云ACR私有(共有)镜像仓库 集成Drone CI
一、Python环境编译 1、处理好venv环境 要生成正常的 requirements.txt 文件,我们就需要先将虚拟环境处理好 创建虚拟环境(可选): 在项目目录中,你可以选择使用虚拟环境,这样你的项目依赖将被隔离在一个独立的环境中。可以使用以下命令创建虚拟环境: python -m venv venv 1.1、然后激活虚拟环境: 在 Windows 上: venv\
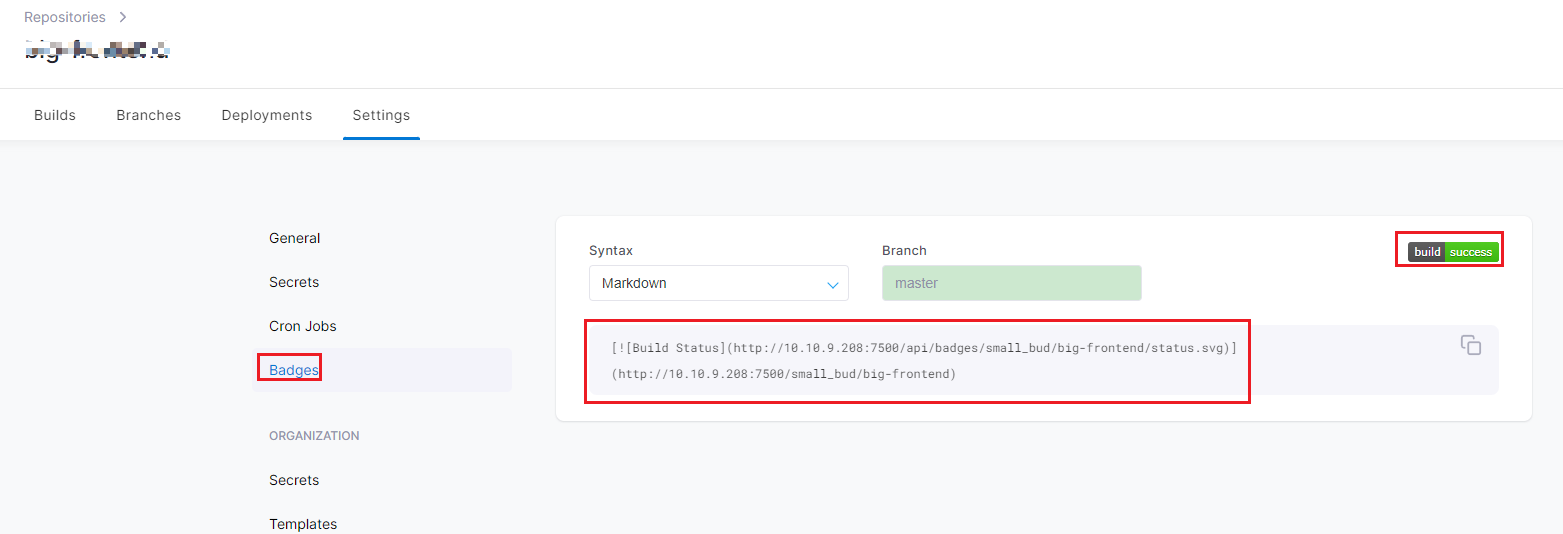
搭建Gitea+Drone轻量级代码管理和CI服务
使用环境 IP地址端口所属服务10.10.9.2083000Gitea网页管理服务10.10.9.2082222SSH、HTTP下载代码服务10.10.9.2087500Drone-Server服务10.10.9.2083100Drone-Runner Gitea 简介 Gitea 是一个开源社区驱动的轻量级代码托管解决方案,后端采用 Go 编写,采用 MIT 许可证,它是从Gogs发展而来

YoloV8改进策略:独家原创,全网首发,复现Drone-Yolo,以及改进方法
摘要 Drone-Yolo在无人机数据集上取得了巨大的成功,mAP0.5指标上取得了显著改进,在VisDrone2019-test上增加了13.4%,在VisDrone2019-val上增加了17.40%。这篇文章我首先复现Drone-Yolo,然后,在Drone-Yolo的基础上加入我自己对小目标检测的改进。 论文:《Drone-Yolo:一种高效的无人机图像目标检测神经网络方法》 htt

drone如何发布docker服务
上篇主要实现了drone在物理机上进行发布程序,这次介绍drone如何发布docker类型的服务。 一 drone.yml文件配置 前提:需要提前在drone里添加文件里面所引用的密钥 kind: pipeline # 定义对象类型,还有secret和signature两种类型type: docker # 定义流水线类型,还有kubernetes、exec、ssh等类型name: dro

gogs和drone如何配合使用
上篇介绍了drone和gogs安装方法,这次介绍这两个如何使用,此篇文章主要介绍在物理机上进行发布。 此处用到的java项目地址:https://gitee.com/huningfei/demo-test 一 配置gogs 1.1 在Gogs中配置指定仓库的”.drone.yml“文件 1.2 ssh-drone.yml具体内容如下所示(适合在本机直接部署) kind: pipelin
drone和gogs安装
背景介绍 什么是 Drone?Drone 是一个面向忙碌的开发团队的自助持续集成和持续交付平台。官网地址:https://www.drone.io/同时,Drone 是使用 Golang 语言进行编写。所有的编译、测试的流程都在 Docker 容器中执行。Drone 通过使用简单的 YAML 配置文件,就可以轻松的定义出一条流水线,并且每一个构建操作都是在一个临时的 Docker 容器中执行