dexterous专题
A Dexterous Hand-Arm Teleoperation System
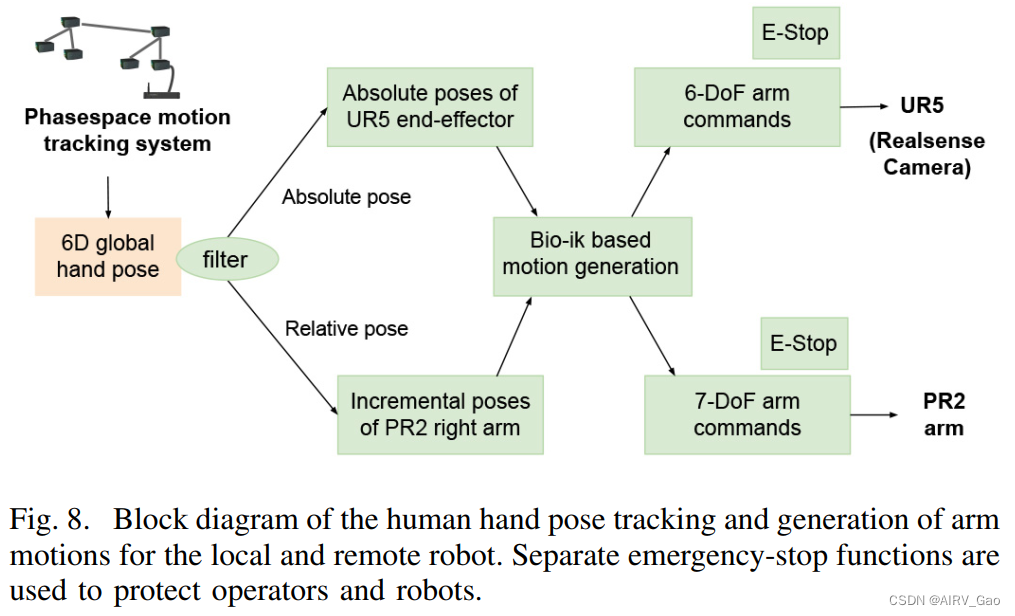
A Dexterous Hand-Arm Teleoperation System Based on Hand Pose Estimation and Active Vision解读 摘要1. 简介2.相关工作2.1 机器人遥操作2.2 主动视觉(Active Vision) 3. 硬件设置4. 基于视觉的机器人手部姿态估计4.1 Transteleop4.2 Dataset 5. 主动视觉
Shadow Dexterous HandUR10e 集成设备培训教程
Shadow Hand Plus & UR10e 一、产品介绍 1.产品概述 Shadow Hand Plus是世界上最先进的5指仿生机器手,它被世界各地的研究人员使用,其前所未有的灵巧性使您可以轻松直观地抓取和操作任何物体。 2.产品特点 1)具有前所未有的灵巧性,是任何研究实验室必备的。 2)通过WI-IF和5G服务,您可以在整个房间内使用该系统,跨越国家,甚