crested专题
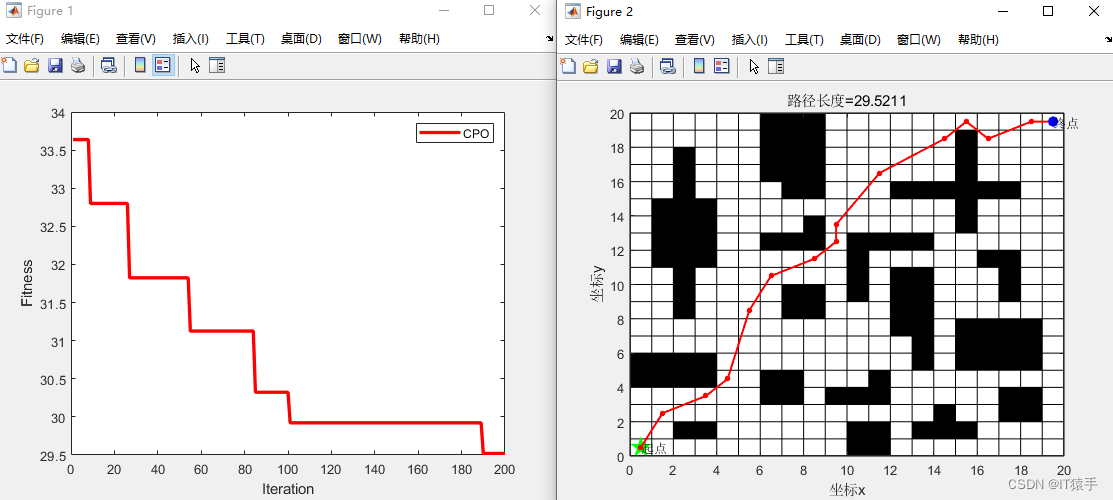
机器人路径规划:基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的机器人路径规划(提供MATLAB代码)
一、机器人路径规划介绍 移动机器人(Mobile robot,MR)的路径规划是 移动机器人研究的重要分支之,是对其进行控制的基础。根据环境信息的已知程度不同,路径规划分为基于环境信息已知的全局路径规划和基于环境信息未知或局部已知的局部路径规划。随着科技的快速发展以及机器人的大量应用,人们对机器人的要求也越来越高,尤其表现在对机器人的智能化方面的要求,而机器人自主路径规划是实现机器人智能化的

2024年新提出的算法:(凤头豪猪优化器)冠豪猪优化算法Crested Porcupine Optimizer(附Matlab代码)
本次介绍一种新的自然启发式元启发式算法——凤头豪猪优化器(Crested Porcupine Optimizer,CPO)。该成果于2024年1月发表在中科院1区SCI top期刊Knowledge-Based Systems(IF = 8.8)上。 1、简介 受到凤头豪猪(CP)各种防御行为的启发,用于精确优化各种优化问题,特别是那些具有大规模攻击的问题。从最不具攻击性到最具攻击性,冠豪猪使