costmap2d专题
ROS naviagtion analysis: costmap_2d--Costmap2D
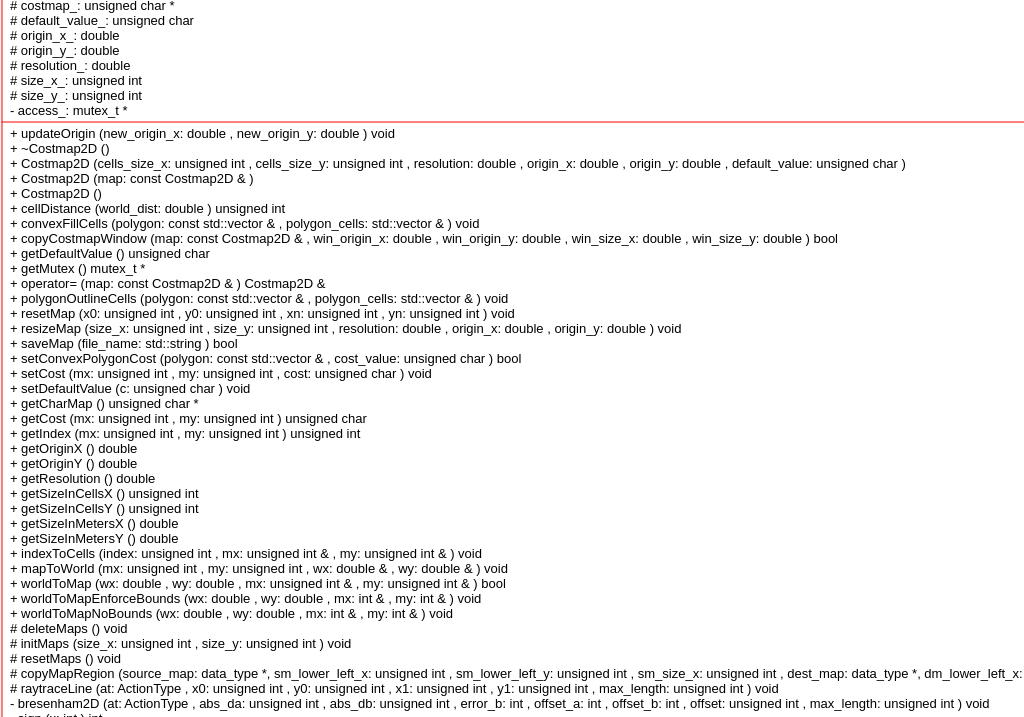
Costmap2D是存储地图数据的父类。真正的地图数据就存储在数据成员unsigned char *costmap_ 。 首先,分析类的构造函数: 默认构造函数:Costmap2D::Costmap2D() : // just initialize everything to NULL by defaultCostmap2D::Costmap2D() :size_x_(0), si