avoidance专题
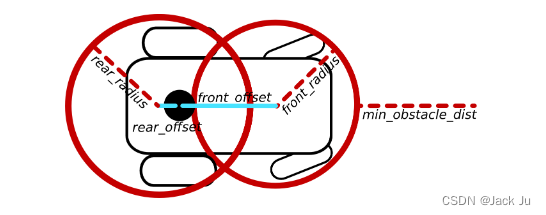
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束
机器人控制算法——TEB算法—Obstacle Avoidance and Robot Footprint Model(避障与机器人足迹模型)
1.How Obstacle Avoidance works 1.1处罚条款 避障是作为整体轨迹优化的一部分来实现的。显然,优化涉及到找到指定成本函数(目标函数)的最小成本解(轨迹)。简单地说:如果一个计划的(未来)姿势违反了与障碍物的期望分离,那么成本函数的成本必须增加。理想情况下,在这些情况下,成本函数值必须是无穷大的,否则优化器可能会更好地完全拒绝这些区域。然而,这将需要优化器处理硬约束
px4 avoidance笔记
最近在用px4官方的avoidance代码跑硬件避障,官方介绍了只要生成符合sensor_msgs::PointCloud2点云信息就能使用,因此为了应用长基线双目,没有使用realsense的相机,但在配置过程中一定要注意有几个地方别搞错了,浪费了很多时间: 点云订阅名称不要搞错,官方代码中话题名称在avoidance.launch中,如下: <env name="ROSCONSOLE_CON
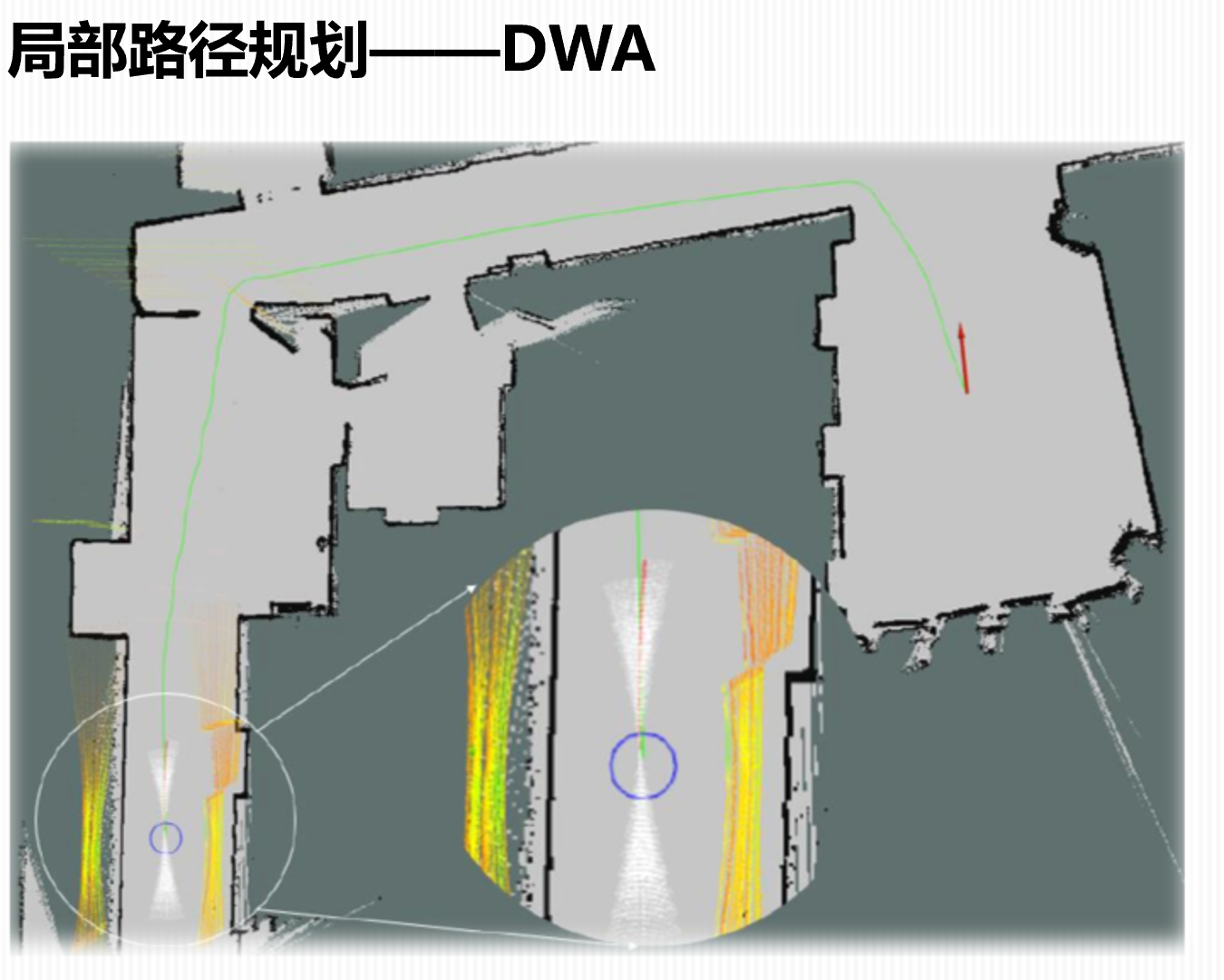
【路径规划】 The Dynamic Window Approach to Collision Avoidance (附python代码实例)
引用与前言 参考链接 引用参考如下: 博客园解释:https://www.cnblogs.com/dlutjwh/p/11158233.html 这篇博客园写的贼棒!我当时就是一边对着论文一边对着他这篇来看的,所以==大部分论文的文字也来源于此== 原文论文:https://ieeexplore.ieee.org/document/580977 没有账号的话 就去sci-hub吧,这