本文主要是介绍STC8增强型单片机开发day03,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
中断系统INT
中断的概念
中断系统是为使 CPU 具有对外界紧急事件的实时处理能力而设置的。
当中央处理机 CPU 正在处理某件事的时候外界发生了紧急事件请求,要求 CPU 暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。实现这种功能的部件称为中断系统,请示 CPU 中断的请求源称为中断源。微型机的中断系统一般允许多人中断源,当几个中新源同时向 CPU 请求中断,要求为它服务的时候,这就存在 CPU 优先响应哪一个中断源请求的问题。通常根据中断源的轻重缓急排队,优先处理最紧急事件的中断请求源,即规定每一个中断源有一个优先级别。CPU 总是先响应优先级别最高的中断请求。

当 CPU 正在处理一个中断源请求的时候(执行相应的中断服务程序),发生了另外一个优先级比它还高的中断源请求。如果 CPU 能够暂停对原来中断源的服务程序,转而去处理优先级更高的中断请求源处理完以后,再回到原低级中断服务程序,这样的过程称为中断嵌套。这样的中断系统称为多级中新系统,没有中断嵌套功能的中断系统称为单级中断系统。

用户可以用关总中断允许位(EA/IE.7)或相应中断的允许位屏蔽相应的中断请求,也可以用打开相应的中断允许位来使 CPU 响应相应的中断申请,每一个中断源可以用软件独立地控制为开中断或关中断状态,部分中断的优先级别均可用软件设置。高优先级的中断请求可以打断低优先级的中断,反之,低优先级的中断请求不可以打断高优先级的中断。当两个相同优先级的中断同时产生时,将由查询次序来决定系统先响应哪个中断。
中断源
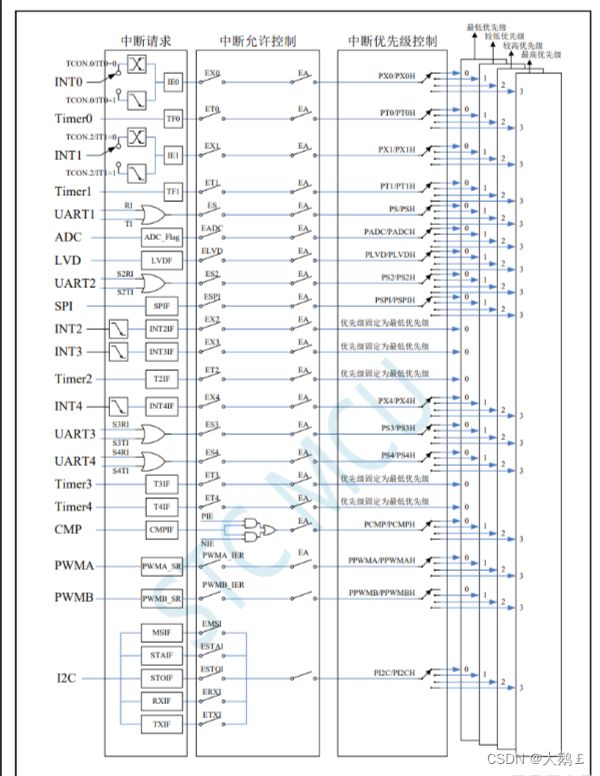
能请示CPU中断的请求源为中断源。STC8H中的中断源如下图
中断寄存器
通过STC8H的用户手册可以查询到所有的中断寄存器,以及中断请求位信息。
http://www.stcmcudata.com/STC8F-DATASHEET/STC8H.pdf
中断函数
通过 interrupt关键字定义中断函数。示例如下:
void UART1_int (void) interrupt 0
{
}
● UART1_int是中断函数的名称,可以随意取,按照自己的需求定
● interrupt是中断函数的标记,说明当前函数是中断函数
● 0是中断次序,这个就需要根据自己业务,查询用户手册来定。
中断函数,可以理解为回调函数,就是这个函数定义出来了,在什么时机调用,不是我们做的,是系统自己调用的。而我们关心的是,某个事件触发了这个函数调用,我们可以在这个函数中写自己的逻辑。
验证Uart的中断函数
接收时亮灯,发送时灭灯
sfr P5M1 = 0xC9;
sfr P5M0 = 0xCA;
sfr P5 = 0xC8;
sbit P53 = P5^3;sfr T2L = 0xd7;
sfr T2H = 0xd6;
sfr AUXR = 0x8e;sfr IE = 0xA8;
sbit EA = IE^7;
sbit ES = IE^4;sfr SCON = 0x98;
sfr SBUF = 0x99;
sbit RI = SCON^0;
sbit TI = SCON^1;void uart_hello(void) interrupt 4 {if(RI) {// 如果接收寄存器RI触发了中断,打开灯RI = 0;P53 = 1;//开} if(TI) {// 如果发送寄存器TI触发了中断,关掉灯TI = 0;P53 = 0;//关}
}void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;i = 57;j = 27;k = 112;do{do{while (--k);} while (--j);} while (--i);
}int main() {P5M1 &= ~0x08, P5M0 |= 0x08; //推挽输出SCON = 0x50;T2L = 0xe8; //65536-11059200/115200/4=0FFE8HT2H = 0xff;AUXR = 0x15;//启动定时器EA = 1;ES = 1;P53 = 0;while(1) {// 休眠1000msDelay1000ms();// 发送一个数据0x11SBUF = 0x11;// 将TI位寄存器置为1 (这里可以不设置, 只要给SBUF赋值了, TI也会自动变为1)TI = 1;}
}
完成的内容有:
● 配置Uart初始化,包括定时发生器
● 查询几个寄存器地址:SBUF,IE
系统时钟
时钟与周期
系统时钟
系统时钟是指计算机中用于控制各个设备协调工作的定时器。它是计算机的主频,是CPU和外设工作的基础,通常表示为以赫兹为单位的频率,如1MHz,10MHz等等。
系统时钟的时钟信号,通常以晶振的形式提供。STC8H单片机支持外部晶振和内部晶振两种时钟源,可以通过相应的配置来选择使用哪种时钟源。
时钟周期
时钟周期是系统时钟一个完整的周期所需的时间。它的倒数就是时钟频率,即每秒钟发生的时钟周期数。例如,STC8H的时钟频率为24MHz,那么每个时钟周期的时间就是1/24MHz=41.67ns。
机器周期
也叫做指令周期。指令周期是一条指令的执行时间。
早期的STC8H单片机的机器周期为12个时钟周期。现在的STC8H可以有两种配置,一个是1T,一个是12T。
● 12T也就是早期的配置,假设当系统时钟为24MHz时,每个机器周期的时间就是12 * 41.67ns = 500ns。
● 1T是芯片架构升级后的,每个机器周期的时间为 1 * 41.67ns = 41.67ns.。
NOP指令
NOP指令是一种汇编指令,表示“no operation”(不执行任何操作)。它不会改变寄存器的值,也不会修改存储器中的数据。在程序中插入NOP指令可以用于延时或调整代码的执行顺序。
在大多数处理器中,NOP指令会被翻译成一个或多个机器指令来实现其“不执行任何操作”的效果。在STC8H单片机中,NOP指令被翻译成一条长度为1个字节的指令,不做任何操作。
NOP指令在某些情况下也被用于填充一些未使用的空间,使程序的大小达到特定的大小或对齐要求。在编写汇编代码时,程序员可以在代码中插入NOP指令来占用空间,使得代码和数据能够对齐在内存中的特定地址上,以提高程序的执行效率。
我们可以理解为让程序执行时,睡1个NOP指令周期的时长。
库函数系统时钟配置
在config.h中,配置系统时钟频率。
//#define MAIN_Fosc 22118400L //定义主时钟
//#define MAIN_Fosc 12000000L //定义主时钟
//#define MAIN_Fosc 11059200L //定义主时钟
//#define MAIN_Fosc 5529600L //定义主时钟
#define MAIN_Fosc 24000000L //定义主时钟
根据实际情况配置系统时钟。
值得注意的是,在系统时钟配置确定后,烧录时的时钟频率和此处配置的频率应该保持一致,否则会出现一些奇奇怪怪的错误。
测试不同时钟的执行周期
睡眠一个指令周期,观测高低电平变化时长。切换不同主频,体会主频不同带来了什么变化?
#include "config.h"
#include "GPIO.h"
#include "delay.h"void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_3; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P5, &GPIO_InitStructure);//初始化
}int main() {GPIO_config();while(1) {P53 = 1;NOP1();P53 = 0;//NOP1();}
}
以下为几种主频下的高低变化情况
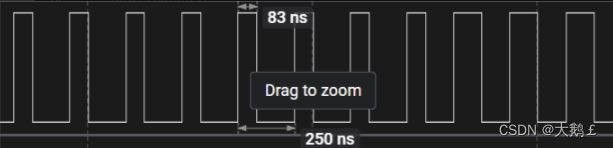
以上是24M主频
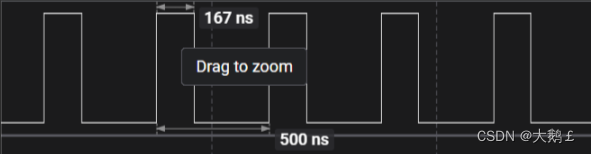
以上是12M主频
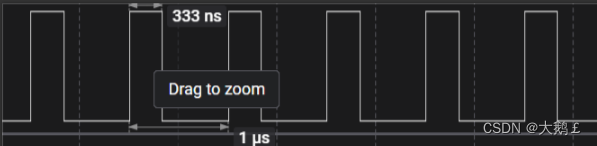
以上是6M主频
小结:
● 主频越高,执行速度越快。
● 主频越高,干扰越强,越容易出现问题。
extern关键字
extern理解
extern是C语言中的一个关键字,用于说明一个全局变量或函数的定义不在本文件中,而在其他文件中,告诉编译器该变量或函数已经在别的文件中定义过了。
在C语言中,如果要在一个源文件中使用另一个源文件中定义的全局变量或函数,需要使用extern关键字声明一下该变量或函数,这样编译器才能知道该变量或函数已经在其他文件中定义过了。
extern变量
以下是extern关键字的用法和示例:
在一个源文件中定义全局变量,然后在另一个源文件中使用该变量:
`driver.c`
int global_var = 10;
`main.c`
#include <stdio.h> extern int global_var; // 声明全局变量
int main() {printf("%d\n", global_var); // 使用全局变量return 0;
}
extern函数
在一个源文件中定义函数,然后在另一个源文件中使用该函数:
`driver.c`
int add(int a, int b) { return a + b;
}
`main.c`
extern int add(int a, int b); // 声明函数
int main() {int result = add(1, 2); // 使用函数printf("%d\n", result);return 0;
}
头文件中定义
需要注意的是,如果在一个源文件中定义了一个全局变量或函数,并且该变量或函数要在多个源文件中使用,那么需要将该变量或函数的定义放在一个头文件中,并在其他源文件中包含该头文件。
例如,将上面的global_var和add函数的定义放在一个头文件中:
`myheader.h`
extern int global_var;
extern int add(int a, int b);
然后在其他源文件中包含该头文件即可使用该变量和函数:
`myimpl.c`
#include "myheader.h" int global_var = 10;int add(int a, int b) {return a + b;
}`test.c`
#include <stdio.h>
#include "myheader.h"
int main() {printf("%d\n", global_var);int result = add(1, 2);printf("%d\n", result);return 0;
}
定时器Timer⭐
定时器
定时器是一种计时装置,通常由一个晶体振荡器提供时钟信号,可以计时一定的时间后执行相应的操作。在单片机中,定时器一般是由计数器和时钟源组成的,可以用来产生一定时间间隔的中断信号,或者用于测量输入信号的周期和占空比等。定时器通常具有多种工作模式和计数方式,可以灵活地应用于各种场合。
STC8H内置了5个16位定时器:T0,T1,T2,T3,T4.
Timer案例
使用定时器,控制板载LED高低电平输出。
// main.c
#include "Config.h"
#include "Timer.h"
#include "GPIO.h"
#include "NVIC.h"void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_3; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P5, &GPIO_InitStructure); //初始化
}
//int arr[];
//int counter = 3;void TIMER_config(void) {TIM_InitTypeDef TIM_InitStructure; //结构定义//定时器0做16位自动重装, 中断频率为100000HZ,中断函数从P6.7取反输出50KHZ方波信号.TIM_InitStructure.TIM_Mode = TIM_16BitAutoReload; //指定工作模式, TIM_16BitAutoReload,TIM_16Bit,TIM_8BitAutoReload,TIM_16BitAutoReloadNoMaskTIM_InitStructure.TIM_ClkSource = TIM_CLOCK_1T; //指定时钟源, TIM_CLOCK_1T,TIM_CLOCK_12T,TIM_CLOCK_ExtTIM_InitStructure.TIM_ClkOut = DISABLE; //是否输出高速脉冲, ENABLE或DISABLETIM_InitStructure.TIM_Value = 65536UL - (MAIN_Fosc / 1000UL); // 初值,指定Timer频率 1000hz (每秒执行1000次,每次1ms(周期))// 不要小于367hz (2.7ms周期)// 不要大于1 000 000hz 一百万 (1us周期)TIM_InitStructure.TIM_Run = ENABLE; //是否初始化后启动定时器, ENABLE或DISABLETimer_Inilize(Timer0,&TIM_InitStructure); //初始化Timer0 Timer0,Timer1,Timer2,Timer3,Timer4NVIC_Timer0_Init(ENABLE,Priority_0); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3}
void main(){GPIO_config();TIMER_config();// 开启全局中断EA = 1;P53 = 0; // 熄灯while(1);
}
// Timer_Isr.c
//========================================================================
// 函数: Timer0_ISR_Handler
// 描述: Timer0中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void Timer0_ISR_Handler (void) interrupt TMR0_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码P53 = ~P53;
}
定时器配置理解
工作模式
工作模式指的是计数方式,timer的计数是在主频计数的基础上,来进行数数的。timer有16位的计数器,通过计数器来计数来确定定时器运行的时长,在关键位置触发定时中断。
● 16位自动重装载模式:可以被设置成定时或者计数两种模式,每当定时器溢出时就会触发中断或者输出信号。
● 16位不可重装载模式:计数值达到设定值后,定时器就会停止计数,需要重新初始化才能继续计数。
● 8位自动重装载模式:8位计数器溢出时触发中断或输出信号。
● 不可屏蔽中断的16位自动重装载模式:16位计数器溢出时触发中断或输出信号,并且可以通过软件或硬件方式清除定时器计数器的值。
通常使用16位自动重装载模式.
中断配置
中断配置是为了打开中断开关的,从而可以触发中断回调的,如果不配置,将无法触发中断回调。
时钟源
可配置的是重要有两个:
● 1T: 跟随主频。
● 12T: 进行12分频。
是否输出高速脉冲
TIM_ClkOut,可以配置DISABLE或者ENABLE
如果配置ENABLE,则P3.5端口会同步输出时钟脉冲
时钟周期设置
时钟周期指的是1秒钟执行多少次timer中断。

TIM_InitStructure.TIM_Value = 65536UL - (MAIN_Fosc / 10000UL);
以上配置中,TIM_InitStructure.TIM_Value最终会转化位寄存器配置。
其中,10000UL表示的就是时钟周期,意思就是这个timer回调1秒钟要调用 10000次。
注意时钟周期的取值范围,通过以上数学公式,(MAIN_Fosc / Timer频率)不能大于65536UL;理论上时钟周期可以无限大,经过测试,最大值为500000UL,也就是2us调用1次。但是,我们要考虑到,如果timer设置到这么高的频率,你在回调中执行的代码时长就不能超过这个值。如果是24M主频,1个时钟周期为 1/24MHz=41.67ns,但是一个指令通常由多个时钟周期组成,一段代码又由多个指令组成,这么一算,可做的操作就很少了。因此我们不要设置得那么大。
启动配置
配置定时器的启动
STC8扩展板
LED灯
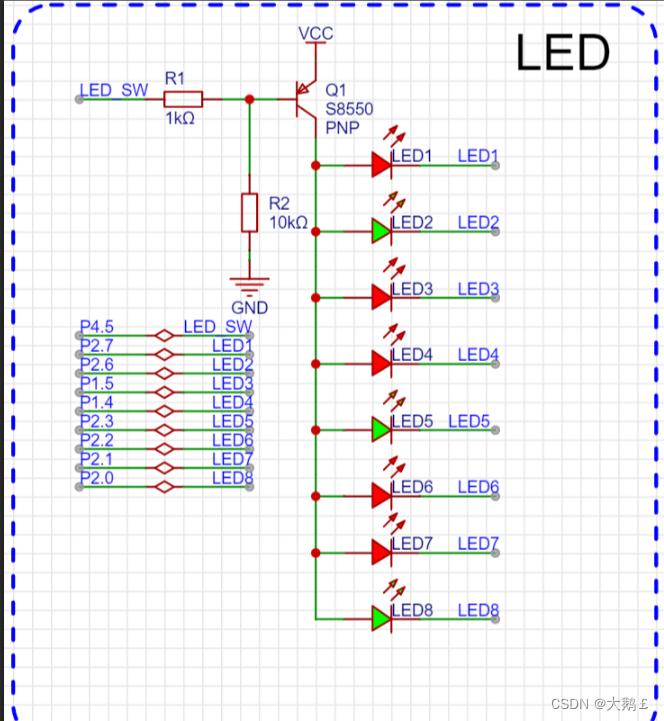
原理图
控制分析
S8550 PNP 特性
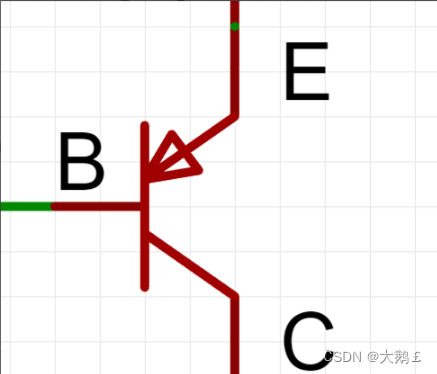
B: base, 基极。(理解:基于/根据 这个条件做什么事情)
E: emitter, 发射极。(理解:发射端)
C: collector, 集电极。(理解:收集电的区域,用电的器件在这个区域)
PNP型三极管,E极为输入端,C极为输出端,B极为控制端
B极 为高电平时,E极到C极的电路截止,无法导通。
B极 为低电平时,E极到C极的电路打开,正常导通。
开关控制
通过引脚 LED_SW来控制 B极是否为高低电平来控制是否导通
LED控制
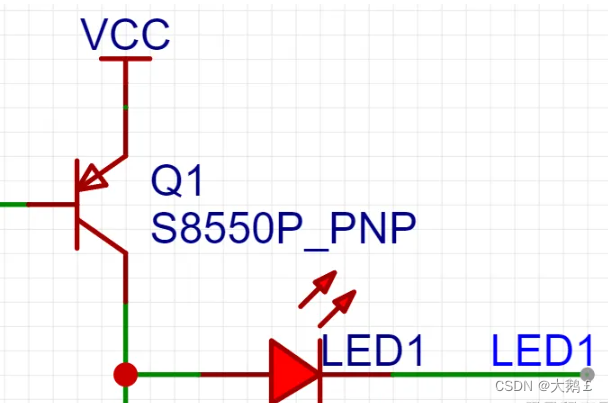
通过LED的负极控制灯是否亮。如果负极为低则亮,负极为高则不亮。
功能设计
点亮LED
点亮灯泡1
几种GPIO模式
- 准双向口,也称为弱上拉模式,可做输入和输出操作,电流小,通常作为信号功能使用
- 推挽输出,也称为强上拉模式,作为输出操作,电流持续,作为功率输出
- 开漏输出,可做输入和输出操作,需要外部提供上拉电阻
- 高阻输入,电流无法输入,但是可以外部输入电平会拉高或拉低其位寄存器,用于数模转换
三极管特点
三极管是电流控制的器件,如果需要三极管导通或是关闭,需要持续给B极输入电流。(相对于mos管而言,三极管功耗较大,mos管耗电要少很多)
示例代码:
#include "config.h"
#include "GPIO.h"
#include "delay.h"void GPIO_config(void)
{GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_7; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P2,&GPIO_InitStructure); //初始化GPIO_InitStructure.Pin = GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P4,&GPIO_InitStructure); //初始化
}int main() {//GPIO 初始化 GPIO_config();// led 开关打开P45 = 0;while(1) {P27 = 1;delay_ms(250);delay_ms(250);delay_ms(250);delay_ms(250);P27 = 0;delay_ms(250);delay_ms(250);delay_ms(250);delay_ms(250);}return 0;
}
走马灯
实现灯的顺序点亮
#include "config.h"
#include "GPIO.h"
#include "delay.h"#define LED1 P27
#define LED2 P26
#define LED3 P15
#define LED4 P14
#define LED5 P23
#define LED6 P22
#define LED7 P21
#define LED8 P20
#define LED_SW P45void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P4, &GPIO_InitStructure);//初始化GPIO_InitStructure.Pin = GPIO_Pin_4 | GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P1, &GPIO_InitStructure);//初始化GPIO_InitStructure.Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_6 | GPIO_Pin_7; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P2, &GPIO_InitStructure);//初始化
}int main() {int i;GPIO_config();EA = 1;LED_SW = 0;while(1) {for(i = 0;i < 8;i++) {LED1 = i == 0 ? 0 : 1;LED2 = i == 1 ? 0 : 1;LED3 = i == 2 ? 0 : 1;LED4 = i == 3 ? 0 : 1;LED5 = i == 4 ? 0 : 1;LED6 = i == 5 ? 0 : 1;LED7 = i == 6 ? 0 : 1;LED8 = i == 7 ? 0 : 1;delay_ms(100);}for(i = 7;i >= 0;i--) {LED1 = i == 0 ? 0 : 1;LED2 = i == 1 ? 0 : 1;LED3 = i == 2 ? 0 : 1;LED4 = i == 3 ? 0 : 1;LED5 = i == 4 ? 0 : 1;LED6 = i == 5 ? 0 : 1;LED7 = i == 6 ? 0 : 1;LED8 = i == 7 ? 0 : 1;delay_ms(100);}}
}
LED呼吸灯(PWM)⭐⭐
PWM基础概念
PWM全称是脉宽调制(Pulse Width Modulation),是一种通过改变信号的脉冲宽度来控制电路输出的技术。PWM技术在工业自动化、电机控制、LED调光等领域广泛应用。
PWM是一种将数字信号转换为模拟信号的技术,它通过改变信号的占空比来控制输出的电平。在STC8H中,PWM输出的频率和占空比可以由程序控制,因此可以用来控制各种电机、灯光和其他设备的亮度、速度等参数。
STC8H芯片
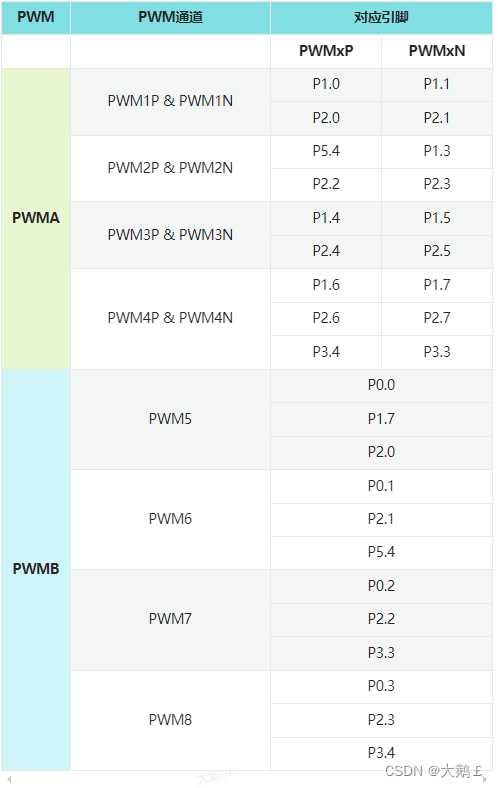
STC8H 系列的单片机内部集成了8 通道 16 位高级PWM 定时器,分成两周期可不同的 PWM,分别命名为 PWMA 和PWMB ,可分别单独设置。
第一组 PWMA 可配置成4 组互补/对称/死区控制的PWM 或捕捉外部信号。
第二组 PWMB 可配置成4 路PWM 输出或捕捉外部信号。
两组 PWM 的时钟频率可分别独立设置。
PWM与引脚对应关系如下图:
PWMA应用
控制引脚P2.7实现LED灯1的呼吸效果。
- 拷贝所需库文件(其他必备库请自行准备)
a. STC8H_PWM.cSTC8H_PWM.h
b. NVIC.cNVIC.h
c. Switch.h - 导入头文件,初始化宏及全局变量
#include "Config.h"
#include "GPIO.h"
#include "Delay.h"
#include "NVIC.h"
#include "Switch.h"
#include "STC8H_PWM.h"#define LED_SW P45#define LED1 P27
#define LED2 P26
#define LED3 P15#define FREQ 1000#define PERIOD ((MAIN_Fosc / FREQ) - 1) // 周期PWMx_Duty dutyA;
- 配置GPIO
void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义// LED_SWGPIO_InitStructure.Pin = GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P4, &GPIO_InitStructure);//初始化// P2GPIO_InitStructure.Pin = GPIO_Pin_6 | GPIO_Pin_7; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P2, &GPIO_InitStructure);//初始化
}
- 配置PWM
void PWM_config(void)
{PWMx_InitDefine PWMx_InitStructure;// 配置PWM4PWMx_InitStructure.PWM_Mode = CCMRn_PWM_MODE2; //模式, CCMRn_FREEZE,CCMRn_MATCH_VALID,CCMRn_MATCH_INVALID,CCMRn_ROLLOVER,CCMRn_FORCE_INVALID,CCMRn_FORCE_VALID,CCMRn_PWM_MODE1,CCMRn_PWM_MODE2PWMx_InitStructure.PWM_Duty = 0; //PWM占空比时间, 0~PeriodPWMx_InitStructure.PWM_EnoSelect = ENO4P | ENO4N; //输出通道选择, ENO1P,ENO1N,ENO2P,ENO2N,ENO3P,ENO3N,ENO4P,ENO4N / ENO5P,ENO6P,ENO7P,ENO8PPWM_Configuration(PWM4, &PWMx_InitStructure);// 配置PWMAPWMx_InitStructure.PWM_Period = PERIOD; //周期时间, 0~65535PWMx_InitStructure.PWM_DeadTime = 0; //死区发生器设置, 0~255PWMx_InitStructure.PWM_MainOutEnable= ENABLE; //主输出使能, ENABLE,DISABLEPWMx_InitStructure.PWM_CEN_Enable = ENABLE; //使能计数器, ENABLE,DISABLEPWM_Configuration(PWMA, &PWMx_InitStructure); //初始化PWM通用寄存器, PWMA,PWMB// 切换PWM4选择PWM4_SW_P26_P27PWM4_SW(PWM4_SW_P26_P27); //PWM4_SW_P16_P17,PWM4_SW_P26_P27,PWM4_SW_P66_P67,PWM4_SW_P34_P33// 初始化PWMA的中断NVIC_PWM_Init(PWMA,DISABLE,Priority_0);
}
- 编写Main函数
void main() {char direction = 1;u8 duty_percent = 0;// 0 -> 100EAXSFR(); /* 扩展寄存器访问使能, 必写! */GPIO_config();PWM_config();EA = 1;// 总开关LED_SW = 0;LED1 = 0; // P2.7 PWM4LED2 = 0;LED3 = 0;// 循环之前,设置一次pwm(可选)dutyA.PWM4_Duty = PERIOD * duty_percent / 100;UpdatePwm(PWM4, &dutyA);// 0 -> 100while(1) {duty_percent += direction;// 让duty_percent一直在0-100来回往返if(duty_percent >= 100) {duty_percent = 100;direction = -1;} else if(duty_percent <= 0) {duty_percent = 0;direction = 1;}// 修改PWM4的dutydutyA.PWM4_Duty = PERIOD * duty_percent / 100;UpdatePwm(PWM4, &dutyA);delay_ms(10);}
}
PWM配置详解
周期
系统主频:1秒钟计数多少次。
代码中的PWM周期(PWM Period),指的是按N等份切分1秒钟,每个等份的计数值。

例如上图,我们按照8等份切分1秒钟的总计数值MAIN_Fosc(主频),每个PWM周期的计数值为:
PWM_Period = MAIN_Fosc / 8 = 24M / 8 = 3M = 3 000 000 单位为次。
即如果将这个3M作为Period参数,可以得到PWM方波每个周期的时长为:
1 / 8 = 0.125s
代码中的配置:
#define PERIOD (MAIN_Fosc / FREQ) // 周期
PWMx_InitStructure.PWM_Period = PERIOD - 1;
配置的是周期中的计数值。
我们的理解策略:通常我们不关心计数值,关心的是1秒钟执行多少次(即频率Hz),也就是一秒钟多少个周期。
因此在代码MAIN_Fosc / 1000中的1000表示的是1秒钟多少个周期(即频率Hz)。
MAIN_Fosc / 1000表示的是每个周期的计数值。那为什么要-1呢?因为计数器是从0开始计数的。
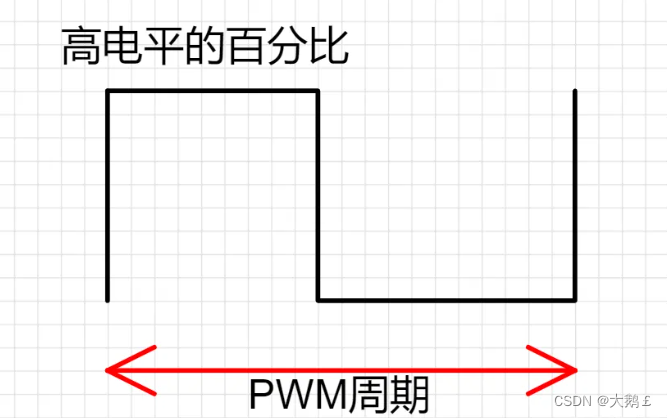
占空比
在一个PWM的周期计数中,高电平的计数时长百分比。
模式
● 冻结: CCMRn_FREEZE
● 匹配时设置通道 n 的输出为有效电平: CCMRn_MATCH_VALID
● 匹配时设置通道 n 的输出为无效电平: CCMRn_MATCH_INVALID
● 翻转: CCMRn_ROLLOVER
● 强制为无效电平: CCMRn_FORCE_INVALID
● 强制为有效电平: CCMRn_FORCE_VALID
● PWM 模式 1: CCMRn_PWM_MODE1
● PWM 模式 2: CCMRn_PWM_MODE2
常用的为PWM 模式 1PWM 模式 2
PWM 模式 1和PWM 模式 2是反向的,一个占空比越大越亮,一个是越小越亮。
使能PWM
PWMx_InitStructure.PWM_MainOutEnable= ENABLE; //主输出使能, ENABLE,DISABLE
PWMx_InitStructure.PWM_CEN_Enable = ENABLE; //使能计数器, ENABLE,DISABLE
PWM_Configuration(PWMA, &PWMx_InitStructure); //初始化PWM通用寄存器, PWMA,PWMB
引脚配置
PWM4_SW(PWM4_SW_P26_P27);
使能配置成功后,pwm才能工作。
如果运行中pwm想停止掉,也可以通过配置使能来停止。
EAXSFR扩展寄存器
由于PWM的配置相关特殊功能寄存器位于扩展RAM区域,访问这些寄存器,需先将P_SW2的BIT7设置为1,才可正常读写。
EAXSFR(); /* 扩展寄存器访问使能 */
详细可参见STC8手册:
● 3.1.2 《外设端口切换控制寄存器 2(P_SW2)》
● 9.2.8 《扩展 SFR 使能寄存器 EAXFR 的使用说明》
震动马达
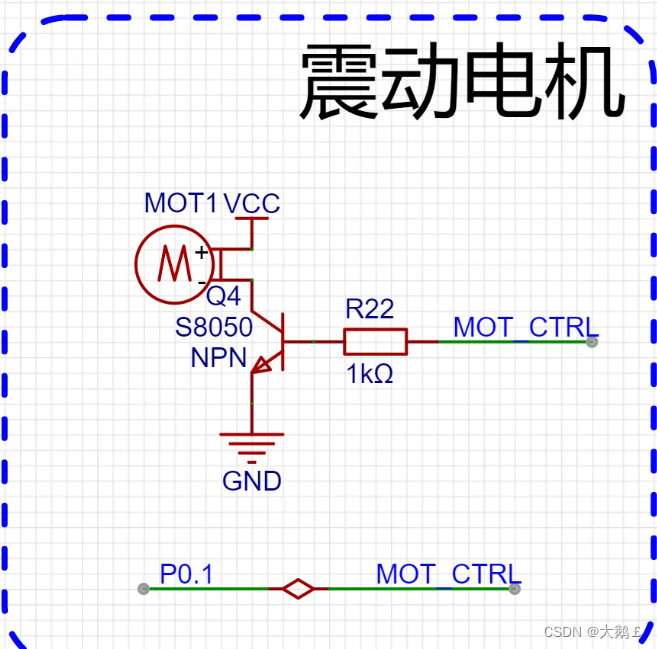
原理图
控制分析
S8050 NPN三极管特性
NPN型三极管的工作原理是基于PN结和PNP型晶体管的工作原理。
当外加正向电压时,发射区的P型半导体被注入少量的N型载流子(电子),这些电子被加速并向基区移动。在基区,电子与空穴结合,从而减少了空穴的浓度。当基区浓度低于发射区浓度时,电子会进一步扩散到集电区,导致集电区产生电流。
当外加反向电压时,PN结会被反向偏置。此时,电子和空穴被吸引到PN结中心,从而阻止了电流的流动。
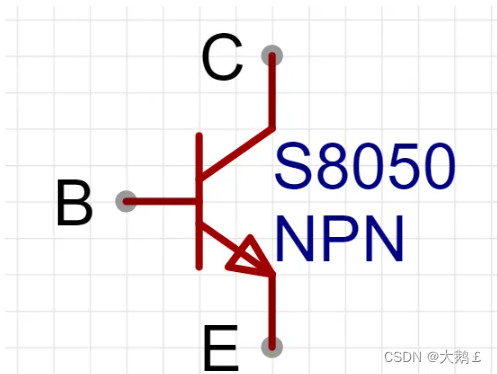
B: base, 基极。(理解:基于/根据 这个条件做什么事情)
E: emitter, 发射极。(理解:发射端,入口)
C: collector, 集电极。(理解:收集电的区域,用电的器件在这个区域)
NPN型三极管,C极为输入端,E极为输出端,B极为控制端
B极 为高电平时,C极到E极的电路导通。
B极 为低电平时,E极到C极的电路断开。
震动控制
通过P0.1引脚控制马达震动
功能设计
实现震动马达的震动。
#include "Config.h"
#include "GPIO.h"
#include "Delay.h"#define MOTOR P01void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_1; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P0, &GPIO_InitStructure);//初始化
}int main() {int i;GPIO_config();EA = 1;while(1) {MOTOR = 1;delay_ms(250);delay_ms(250);delay_ms(250);delay_ms(250);MOTOR = 0;delay_ms(250);delay_ms(250);delay_ms(250);delay_ms(250);}
}
实现的是1秒钟控制一次马达震动。
震动马达PWM
PWMB的应用
实现不同占空比下的震动的效果
拷贝依赖
- STC8H_PWM.hSTC8H_PWM.c
- NVIC.hNVIC.c
- Switch.h
实现main.c
#include "Config.h"
#include "Delay.h"
#include "GPIO.h"
#include "STC8H_PWM.h"
#include "NVIC.h"
#include "Switch.h"#define MOTOR P01#define PREQ 1000#define PERIOD (MAIN_Fosc / PREQ)void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_1; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P0, &GPIO_InitStructure);//初始化
}
void PWM_config(void)
{PWMx_InitDefine PWMx_InitStructure;PWMx_InitStructure.PWM_Mode = CCMRn_PWM_MODE1; //模式, CCMRn_FREEZE,CCMRn_MATCH_VALID,CCMRn_MATCH_INVALID,CCMRn_ROLLOVER,CCMRn_FORCE_INVALID,CCMRn_FORCE_VALID,CCMRn_PWM_MODE1,CCMRn_PWM_MODE2PWMx_InitStructure.PWM_Duty = 0; //PWM占空比时间, 0~PeriodPWMx_InitStructure.PWM_EnoSelect = ENO6P; //输出通道选择, ENO1P,ENO1N,ENO2P,ENO2N,ENO3P,ENO3N,ENO4P,ENO4N / ENO5P,ENO6P,ENO7P,ENO8PPWM_Configuration(PWM6, &PWMx_InitStructure); //初始化PWM, PWMA,PWMBPWMx_InitStructure.PWM_Period = PERIOD - 1; //周期时间, 0~65535PWMx_InitStructure.PWM_DeadTime = 0; //死区发生器设置, 0~255PWMx_InitStructure.PWM_MainOutEnable= ENABLE; //主输出使能, ENABLE,DISABLEPWMx_InitStructure.PWM_CEN_Enable = ENABLE; //使能计数器, ENABLE,DISABLEPWM_Configuration(PWMB, &PWMx_InitStructure); //初始化PWM通用寄存器, PWMA,PWMBPWM6_SW(PWM6_SW_P01); //PWM6_SW_P21,PWM6_SW_P54,PWM6_SW_P01,PWM6_SW_P75NVIC_PWM_Init(PWMB,DISABLE,Priority_0);
}void main(){PWMx_Duty duty;u8 duty_percent = 0; // 0 - 100EAXSFR();GPIO_config();PWM_config();duty.PWM6_Duty = 0;UpdatePwm(PWM6, &duty);while(1){delay_ms(10);// 设置占空比duty.PWM6_Duty = PERIOD * duty_percent / 100;UpdatePwm(PWMB, &duty);// 修改占空比 0 -> 100duty_percent++;if(duty_percent > 100){duty_percent = 0;}}
}
电位器案例(ADC)⭐⭐
案例介绍
通过控制滑动变阻器,来观察电压变化。
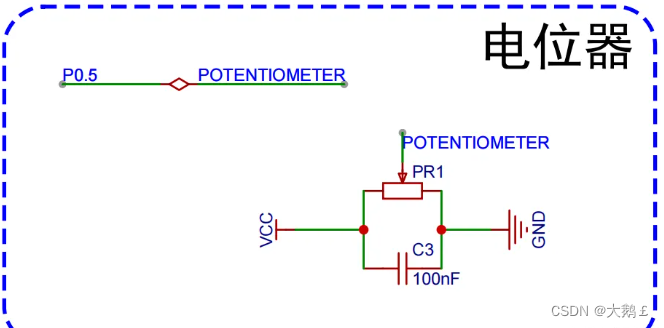
- 通过万用表测量 P0.5位置的电压
- 通过代码读取出 P0.5位置的电压
万用表测量
- 调整万用表到电压测量位
- 正极接P0.5
- 负极接GND
- 读取值
ADC概念
ADC(Analog to Digital Converter 模数转换器)是一种将模拟信号转换为数字信号的电路。在电子系统中,模拟信号常常需要转换为数字信号进行处理和存储。模数转换的基本原理是将模拟信号进行采样,并将采样值量化为数字表示。
● 采样:是指在一定时间间隔内对模拟信号进行测量,并将测量值存储在数字形式的数据中
● 量化:是将这些连续的模拟信号值离散化为一系列数字值,通常使用二进制表示。
简单理解,ADC是把模拟信号转换为数字信号的工具,我们可以认为,一个信号有强弱之分,强弱的体现为电压的高低。在数字电路中,只有0和1之分,也就是高电平或低电平。那么体现不了这个强弱。ADC的作用就是体现强弱,精确化的拿到具体的值。
应用场景:
- 医疗设备:如心电图、血压计之类。
- 音频信号处理:在数字音频处理中,ADC将模拟音频信号转换为数字信号,然后可以进行数字信号处理和存储。
- 电力系统:测量电压。
总之,需要知道信号强弱的,需要将模拟信号转为数字信号的都会用到ADC。
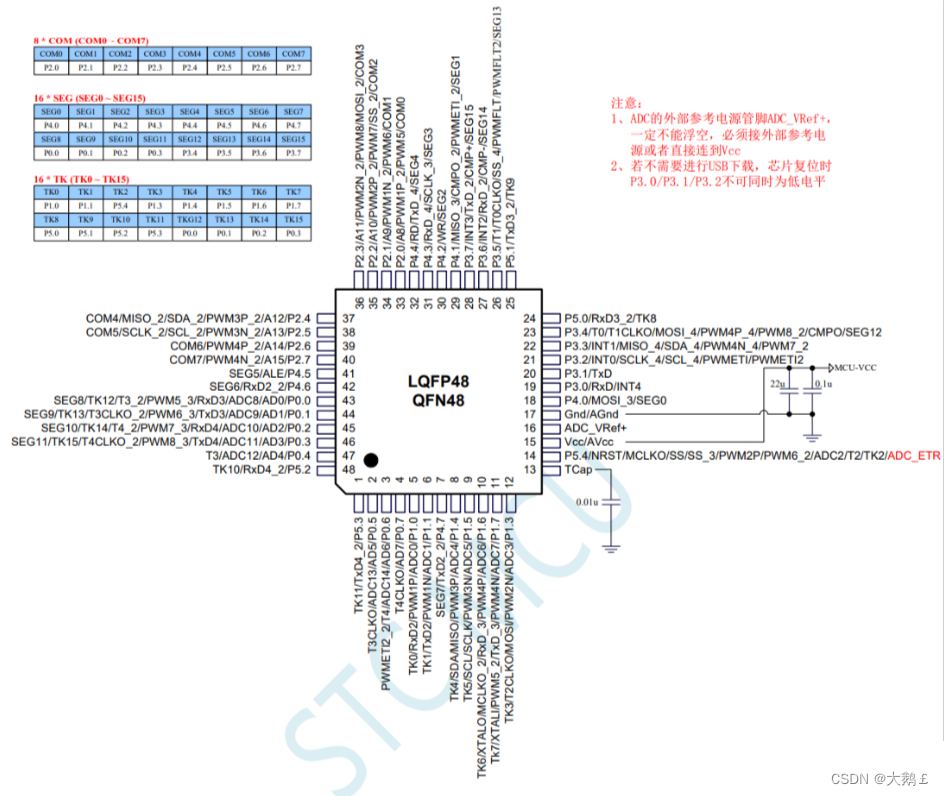
STC8H芯片有15个通道的ADC功能引脚:
| ADC功能 | 引脚 |
|---|---|
| ADC0 | P1.0 |
| ADC1 | P1.1 |
| ADC2 | P5.4 |
| ADC3 | P1.3 |
| ADC4 | P1.4 |
| ADC5 | P1.5 |
| ADC6 | P1.6 |
| ADC7 | P1.7 |
| ADC8 | P0.0 |
| ADC9 | P0.1 |
| ADC10 | P0.2 |
| ADC11 | P0.3 |
| ADC12 | P0.4 |
| ADC13 | P0.5 |
| ADC14 | P0.6 |
代码实现
IO初始化为高阻输入
void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_HighZ; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P0, &GPIO_InitStructure);//初始化
}
ADC配置逻辑
/******************* AD配置函数 *******************/
void ADC_config(void)
{ADC_InitTypeDef ADC_InitStructure; //结构定义ADC_InitStructure.ADC_SMPduty = 31; //ADC 模拟信号采样时间控制, 0~31(注意: SMPDUTY 一定不能设置小于 10)ADC_InitStructure.ADC_CsSetup = 0; //ADC 通道选择时间控制 0(默认),1ADC_InitStructure.ADC_CsHold = 1; //ADC 通道选择保持时间控制 0,1(默认),2,3ADC_InitStructure.ADC_Speed = ADC_SPEED_2X1T; //设置 ADC 工作时钟频率 ADC_SPEED_2X1T~ADC_SPEED_2X16TADC_InitStructure.ADC_AdjResult = ADC_RIGHT_JUSTIFIED; //ADC结果调整, ADC_LEFT_JUSTIFIED,ADC_RIGHT_JUSTIFIEDADC_Inilize(&ADC_InitStructure); //初始化ADC_PowerControl(ENABLE); //ADC电源开关, ENABLE或DISABLENVIC_ADC_Init(DISABLE,Priority_0); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
}
数据读取与转换
result = Get_ADCResult(ADC_CH13);
v = result * 2.5 / 4096;
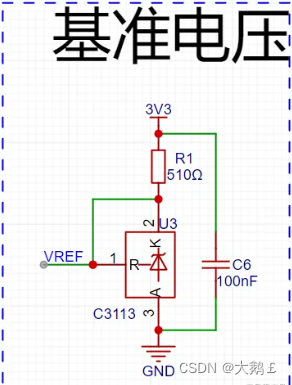
芯片基准电压,参考ADC_VRef+引脚,此引脚设计如下:
ADC为12位精度的,意思是最大值是2的12次方,值为4096.
ADC的这个最大值,表示的是最大测量范围:
- 数值最大为4096
- 测量的电压值不能超过基准电压
- 基准电压对应的值为4096
记住:我们用4096表示基准电压。
以上原理图中,基准电压由 VREF电压决定。这个电路中用到了一个芯片CJ431/CD431,这是一款电压基准芯片,会恒定的输出2.5V电压。
在我们的设计方案中,理论上可以不使用这个电压基准芯片的,直接连接3V3,但是LDO的输出稳定性不够,因此使用电压基准芯片会更为准确。
由以上我们可以得出:
- 基准电压为:2.5V
- 基准电压对应的数值是4096
- 测量的值为ADC引脚
- 电压值的计算:

反向得到电源输入电压
- 将ADC_Vref+引脚接到VCC管脚
- MCU_Vcc = 4096 * 1.19V / 12位ADC转换结果(CH15)
这篇关于STC8增强型单片机开发day03的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








