本文主要是介绍第十八弹 常用可视化工具的使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
查看提供的rqt工具:

rqt_bag rqt_graph rqt_multiplot rqt_shell
rqt_console rqt_image_view rqt_plot rqt_virtual_joy
rqt_dep rqt_logger_level rqt_py_trees 1. 计算图可视化工具——rqt_graph
见: 第十五弹 ROS中的坐标系管理系统
Wiki上关于rqt_graph的介绍:http://wiki.ros.org/rqt_graph
rqt_graph 提供了一个用于可视化 ROS 计算图的 GUI 插件。可以查看节点间的通信关系。

2. 管理日志信息——rqt_console
古月大佬的博客: ROS2入门教程——10. rqt_console工具的使用

下面用一个王八撞墙的例子来演示:

Severity中分以下等级:
- Fatal:致命级,描述系统为了自我保护即将终止的消息
- Error:错误级,描述非致命但是会阻碍程序运行的消息
- Warn:警告级,描述不损坏功能运行但是预期之外的行为的消息
- Info:信息级,描述系统正常运行时事件和状态消息
- Debug:调试级,描述系统一步一步运行的详细消息
3. 变量时间趋势线——rqt_plot


比如选择小乌龟的位置信息(/turtle1/pose):
会提供线速度、角速度、角度、x、y信息:


4. 查看摄像头图像——rqt_image_view

可以显示热成像图、灰度图等,感兴趣的同志可以看看:
ROS学习笔记七:在ROS中使用USB摄像头
5.三维可视化平台—— Rviz
ROS探索总结(五十七)—— Rviz三维可视化平台
rviz是一款三维可视化工具,很好的兼容了各种基于ROS软件框架的机器人平台。在rviz中,可以使用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界面中呈现出来。同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
启动rviz的命令:
roscorerosrun rviz rviz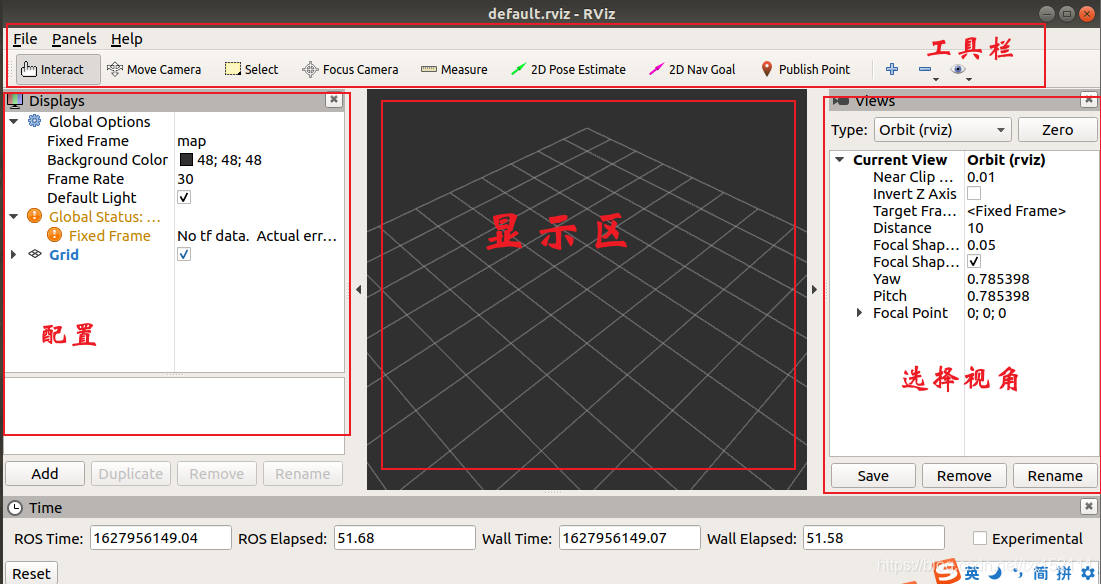
6. 三维物理仿真平台——Gazebo
Gazebo提供了在复杂的室内和室外环境中,准确地模拟多个数量机器人的功能。 值得称赞的是其强大的物理引擎,高质量的图形以及便捷的图形编程界面。 最重要的是,Gazebo是一个充满活力的社区的免费场所。Gazebo中文网:https://www.gazebosim.cn/
ROS探索总结(五十八)—— Gazebo物理仿真平台
启动仿真环境:

elevator_world.launch rubble_world.launch
empty_world.launch shapes_world.launch
mud_world.launch willowgarage_world.launch
range_world.launch
roslaunch gazebo_ros willowgarage_world.launch

如果报错Gazebo [Err] [REST.cc:205] Error in REST request 的话,可以看看:
番外篇 虚拟机中启动ROS中的Gazebo报错Error in REST request
也许能解决你的问题。
这篇关于第十八弹 常用可视化工具的使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





