本文主要是介绍20- ESP32-S3 SPI 外设,主设备编程方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ESP32-S3 SPI 外设,主设备编程方法
SPI简介
SPI,全称为Serial Peripheral Interface,是一种常见的串行通信协议,用于微控制器和其外设之间的通信。SPI接口通常包括四条线:MOSI(主设备输出,从设备输入)、MISO(主设备输入,从设备输出)、SCK(时钟)和CS(片选)。
多从机SPI 通信网络连接👇
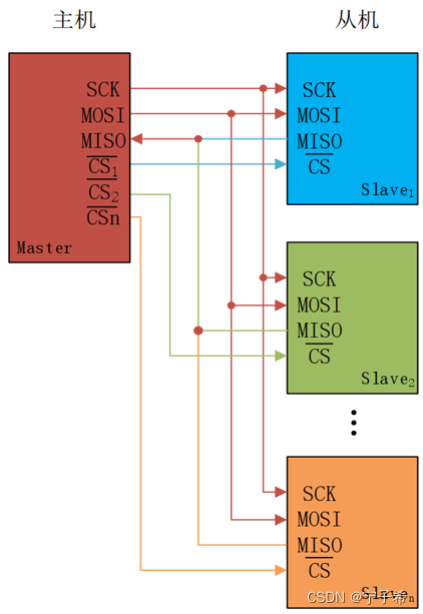
可见MOSI、MISO、SCLK 引脚连接 SPI 总线上每一个设备,如果 CS 引脚为低电平(一般高电平有效),则从设备只侦听主机并与主机通信。SPI 主设备一次只能和一个从设备进行通信。如果主设备要和另外一个从设备通信,必须先终止和当前从设备通信,否则不能通信。
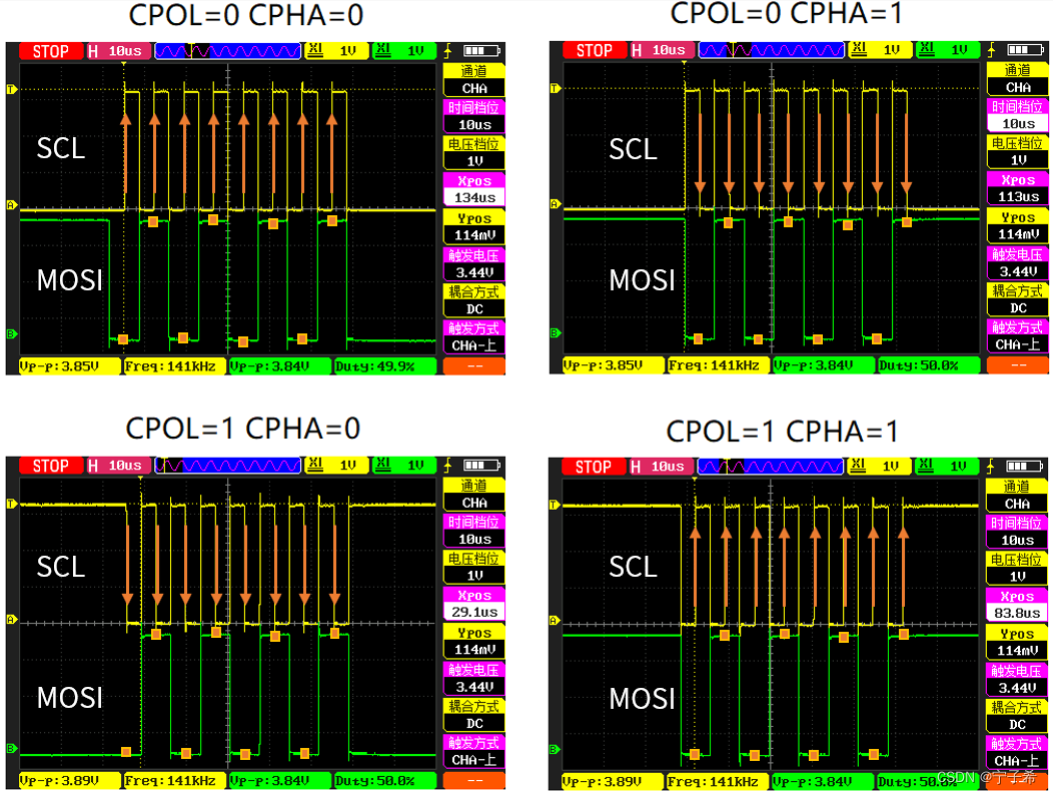
SPI 通信有 4 种不同的模式,不同的从机可能在出厂时就配置为某种模式,这是不能改变的。通信双方必须工作在同一模式下,才能正常进行通信,所以可以对主机的 SPI 模式进行配置。SPI 通信模式是通过配置CPOL(时钟极性)和CPHA(时钟相位)来选择的。
🔮CPOL,详称 Clock Polarity,就是时钟极性,当主从机没有数据传输的时候即空闲状态,SCL 线的电平状态,假如空闲状态是高电平,CPOL=1;若空闲状态时低电平,那么CPOL = 0。
🔮CPHA,详称Clock Phase,就是时钟相位,实质指的是数据的采样时刻。CPHA = 0 表 示数据的采样是从第1 个边沿信号上即奇数边沿,具体是上升沿还是下降沿的问题,是由CPOL 决定的。CPHA=1 表示数据采样是从第 2 个边沿即偶数边沿。
当然,SPI 通信的4种模式是由两个参数决定的:时钟极性(CPOL)和时钟相位(CPHA)。这两个参数共同定义了数据在时钟信号的哪个边沿被采样,以及在空闲状态时,时钟信号的电平是高还是低。下面是这4种模式的详细说明:
-
模式0 (CPOL=0, CPHA=0):在这种模式下,CPOL为0,表示在空闲状态时,时钟信号为低电平。CPHA也为0,表示数据在时钟信号的第一个(上升)边沿被采样。
-
模式1 (CPOL=0, CPHA=1):在这种模式下,CPOL为0,表示在空闲状态时,时钟信号为低电平。但是,CPHA为1,表示数据在时钟信号的第二个(下降)边沿被采样。
-
模式2 (CPOL=1, CPHA=0):在这种模式下,CPOL为1,表示在空闲状态时,时钟信号为高电平。CPHA为0,表示数据在时钟信号的第一个(下降)边沿被采样。
-
模式3 (CPOL=1, CPHA=1):在这种模式下,CPOL为1,表示在空闲状态时,时钟信号为高电平。CPHA为1,表示数据在时钟信号的第二个(上升)边沿被采样。
SPI控制器介绍
ESP32-S3 芯片集成了四个SPI 控制器,分别为 SPI0、SPI1、SPI2 和SPI3。SPI0 和SPI1 控器主要供内部使用以访问外部 FLASH 和 PSRAM,所以只能使用SPI2 和 SPI3。SPI2 又称为HSPI,SPI3 又称为VSPI,这两个属于GP-SPI。
✨GP-SPI 特性:
| 特性 | 描述 |
|---|---|
| 支持模式 | 主机模式和从机模式 |
| 支持通信方式 | 半双工通信和全双工通信 |
| 支持的数据模式 | - SPI2: 1-bit SPI 模式、2-bit Dual SPI 模式、4-bit Quad SPI 模式、QPI 模式、8-bit Octal 模式、OPI 模式 |
| - SPI3: 1-bit SPI 模式、2-bit Dual SPI 模式、4-bit Quad SPI 模式、QPI 模式 | |
| 可配置时钟频率 | - 主机模式下:最高 80MHz |
| - 从机模式下:最高 60MHz | |
| 数据位读写顺序可配置 | 是 |
| 时钟极性和相位可配置 | 是 |
| 支持的 SPI 时钟模式 | 四种:模式0 ~ 模式3 |
| 主机模式下的 CS 线数 | - SPI2: CS0 ~ CS5 |
| - SPI3: CS0 ~ CS2 | |
| 支持设备类型 | 传感器、显示屏控制器、Flash 或 RAM 芯片 |
| 引脚映射 | SPI2 和SPI3 接口相关信号线可通过 GPIO 交换矩阵和 IO_MUX 实现与芯片引脚的映射 |
SPI主设备编程
ESP32 IDF库的SPI主设备驱动程序的API使用流程大致如下
-
初始化SPI总线:使用
spi_bus_initialize()函数初始化SPI总线。这个函数需要一个spi_bus_config_t结构体,该结构体包含了SPI总线的配置信息,如时钟速度、数据模式等。 -
添加SPI设备:使用
spi_bus_add_device()函数将SPI设备添加到SPI总线上。这个函数需要一个spi_device_interface_config_t结构体,该结构体包含了SPI设备的配置信息,如片选信号、时钟极性和相位等。 -
创建SPI事务:创建一个
spi_transaction_t结构体,该结构体定义了一个SPI事务。一个事务包括一个命令阶段和一个数据阶段。在命令阶段,主设备会发送一个命令给从设备。在数据阶段,主设备和从设备会交换数据。 -
发送SPI事务:使用
spi_device_transmit()函数发送SPI事务。这个函数会阻塞,直到事务完成。如果你希望在发送事务后立即返回,可以使用spi_device_queue_trans()函数将事务添加到队列中,然后使用spi_device_get_trans_result()函数获取事务的结果。 -
移除SPI设备:当不再需要与SPI设备通信时,可以使用
spi_bus_remove_device()函数将设备从SPI总线上移除。 -
释放SPI总线:最后,使用
spi_bus_free()函数释放SPI总线。
简单来说就是首先初始化SPI总线,然后添加一个SPI设备。接着,我们创建一个SPI事务,并发送了这个事务。最后,移除SPI设备,并释放了SPI总线。
#include "driver/spi_master.h" // 引入SPI主设备驱动程序的头文件// 初始化SPI总线
spi_bus_config_t bus_config = {.miso_io_num = PIN_NUM_MISO, // MISO引脚的GPIO编号.mosi_io_num = PIN_NUM_MOSI, // MOSI引脚的GPIO编号.sclk_io_num = PIN_NUM_CLK, // SCLK引脚的GPIO编号.quadwp_io_num = -1, // QUADWP引脚的GPIO编号,-1表示不使用.quadhd_io_num = -1, // QUADHD引脚的GPIO编号,-1表示不使用
};/*spi_bus_initialize函数初始化HSPI(SPI2) 总线第一个参数是SPI主机的ID,这里使用的是HSPI_HOST第二个参数是一个指向spi_bus_config_t结构体的指针,该结构体包含了SPI总线的配置信息第三个参数是DMA通道,这里设置为1
*/
spi_bus_initialize(HSPI_HOST, &bus_config, 1);// 添加SPI设备
spi_device_interface_config_t dev_config = {.clock_speed_hz = 10000000, // SPI时钟速度,单位为Hz.mode = 0, // SPI模式,0表示模式0.spics_io_num = PIN_NUM_CS, // CS引脚的GPIO编号.queue_size = 7, // 事务队列的大小,这里设置为7
};
spi_device_handle_t handle; // SPI设备的句柄/*spi_bus_add_device函数将SPI设备添加到HSPI总线第一个参数是SPI主机的ID,这里使用的是HSPI_HOST第二个参数是一个指向spi_device_interface_config_t结构体的指针,该结构体包含了SPI设备的配置信息第三个参数是一个指向SPI设备句柄的指针,该句柄在函数返回时会被设置为新添加的设备的句柄
*/
spi_bus_add_device(HSPI_HOST, &dev_config, &handle);// 创建SPI事务
spi_transaction_t trans_desc;
trans_desc.addr = 0; // 地址阶段的值,0表示没有地址阶段
trans_desc.cmd = 0; // 命令阶段的值,0表示没有命令阶段
trans_desc.flags = 0; // 事务的标志,0表示没有特殊标志
trans_desc.length = 8 * 4; // 事务的长度,单位为位
trans_desc.rxlength = 0; // 接收的长度,0表示没有接收数据
trans_desc.tx_buffer = tx_data; // 发送缓冲区的指针
trans_desc.rx_buffer = rx_data; // 接收缓冲区的指针/*发送SPI事务spi_device_transmit函数使用指定的SPI设备发送事务第一个参数是SPI设备的句柄第二个参数是一个指向spi_transaction_t结构体的指针,该结构体定义了一个SPI事务
*/
spi_device_transmit(handle, &trans_desc);
/*移除SPI设备spi_bus_remove_device函数从SPI总线上移除指定的SPI设备参数是要移除的SPI设备的句柄
*/
spi_bus_remove_device(handle);/*释放SPI总线spi_bus_free函数释放HSPI总线参数是要释放的SPI总线的主机ID
*/
spi_bus_free(HSPI_HOST);
结论
参考资料
🚩正点原子DNESP32S3 开发板教程-IDF 版
🚩乐鑫官方手册
🚩微软Copilot
这篇关于20- ESP32-S3 SPI 外设,主设备编程方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





