本文主要是介绍网优干货:ACP交付详解版(2),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
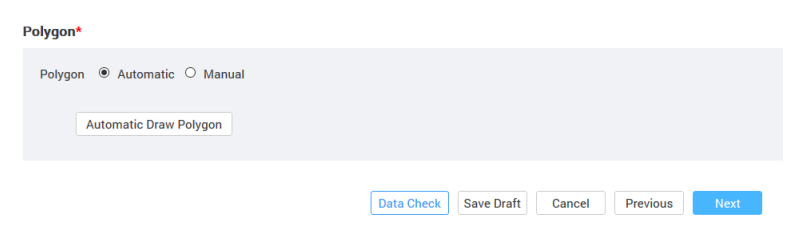
1.1. 优化区域设置
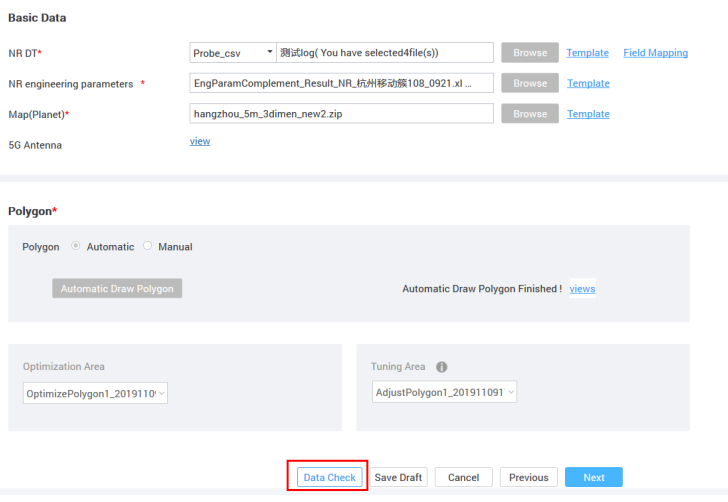
ACP需要绘制Polygon以设定Optimization Area(优化区域)和Tuning Area(调整区域),Optimization Area是指待优化的Cluster的地理边界,Tuning Area是指允许调整Pattern及RF参数的站点的边界。一般情况下,Tuning Area要包含Optimization Area,如果有特殊情况(如Optimization Area内部分站点不允许调整),也允许不完全包含。
ACP支持自动生成Polygon和人工绘制Polygon两种方式。
![]()
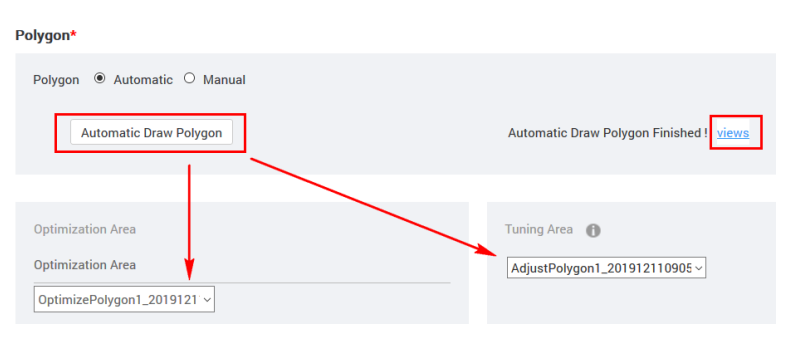
1.1.1. 自动生成Polygon
选择自动生成Polygon时,点击Automatic Draw Polygon按钮,工具将自动计算并生成Optimization Area和Tuning Area对应的Polygon。
![]()
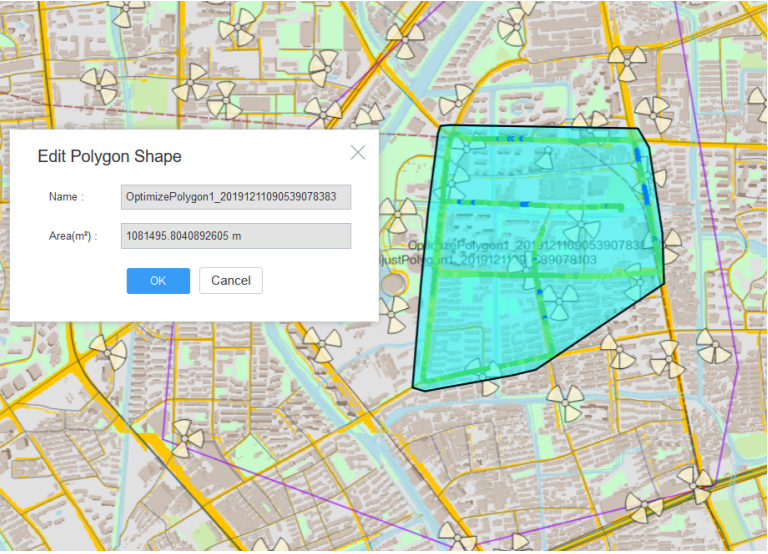
生成完成后可点击views按钮,跳转到GIS页面查看生成的Polygon,并可对Polygon进行编辑操作。自动生成Polygon和进入GIS页面都需要等待一定时间。
![]()
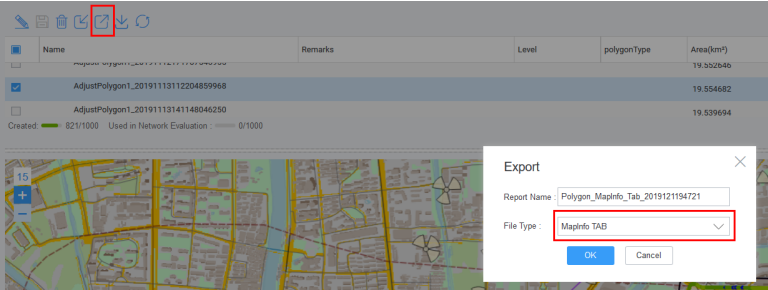
已经绘制好的Polygon支持导出为Mapinfo TAB等格式,方便在不同的GenexCloud平台间传递。
![]()
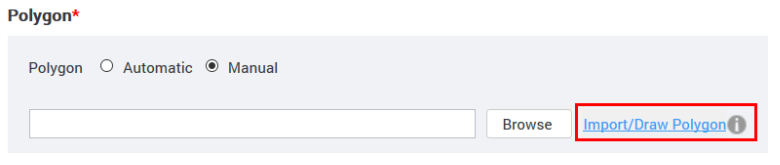
1.1.2. 人工绘制Polygon
选择人工绘制Polygon时,ACP支持在线绘制Polygon或导入已有的Polygon文件。点击Import/Draw Polygon按钮,跳转到GIS页面进行Polygon绘制或导入。
![]()
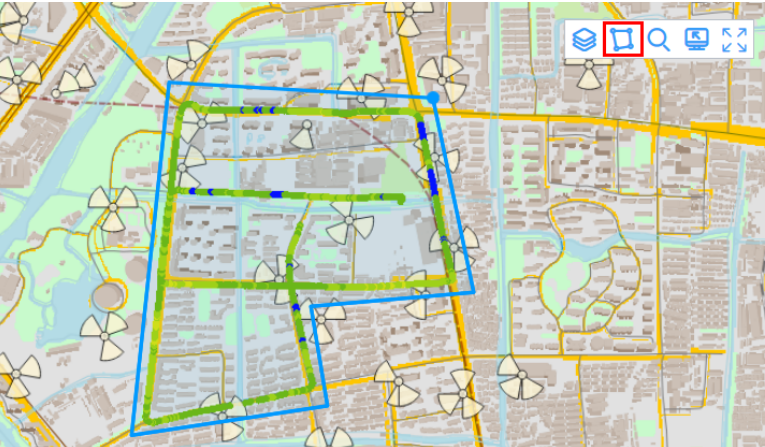
点击
![]()
绘制Polygon,先绘制优化区域,再绘制调整区域,调整区域一般相对优化区域外扩1~2圈站点。如果导入的DT数据完全包含在优化区域和调整区域内,则可以将优化区域和调整区域合一,只需要绘制一个Polygon即可。
1.1.3. 导入已有Polygon
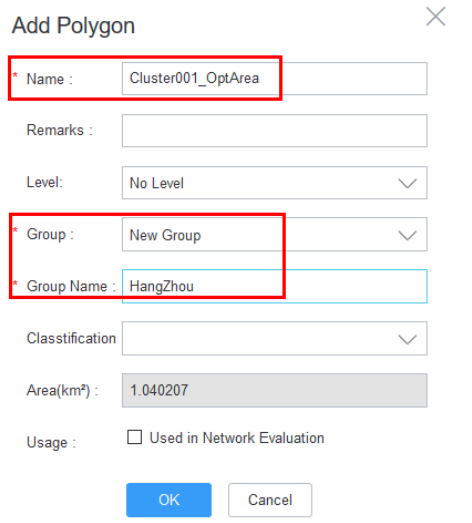
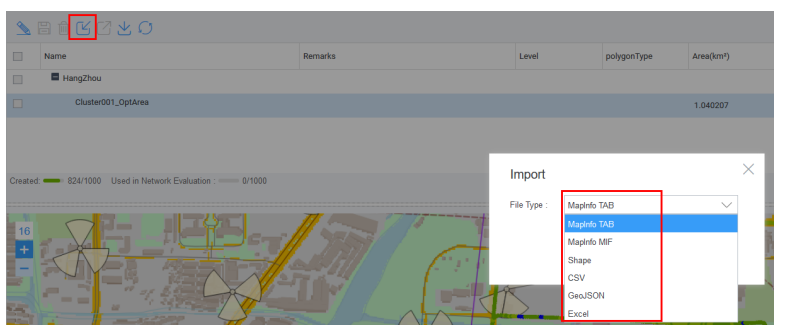
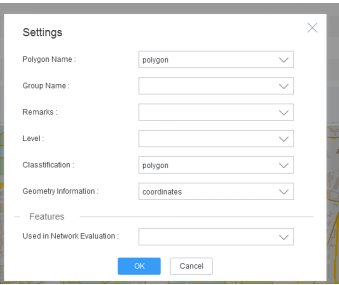
如果已获取到Polygon图层文件,进入GIS界面并点击左上角导入按钮,选择对应的Polygon文件格式,导入获取到的Polygon图层文件。
![]()
在弹出的Setting窗口直接点击OK按钮,即可完成Polygon导入。
![]()
可参考《使用Mapinfo绘制Polygon图层文件指导》
,使用Mapinfo工具绘制并导出Polygon。
1.2. 数据完整性检查
完成数据导入和优化区域设置后,点击Data Check按钮,进行数据有效性检查。
![]()
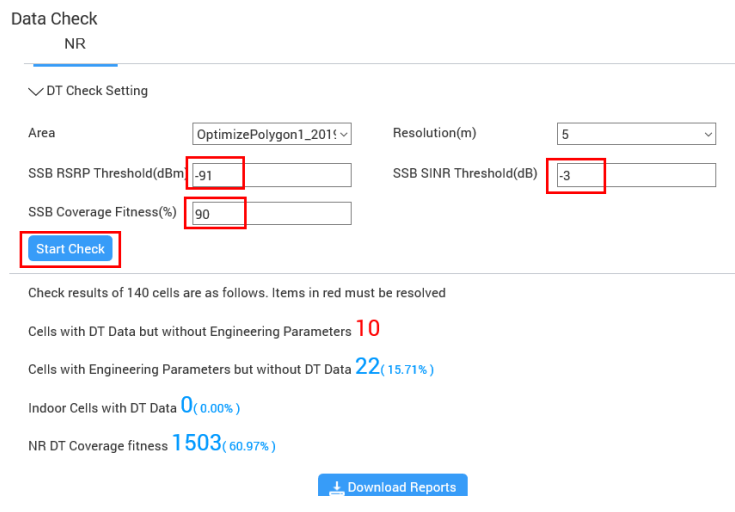
在Data Check窗口中,设置SSB RSRP/SSB SINR门限和SSB路测覆盖率优化目标,然后点击Start Check按钮开始进行数据检查,检查完成后界面会呈现结果,并支持检查报告下载。
![]()
ACP当前支持四个检查项目,包括:
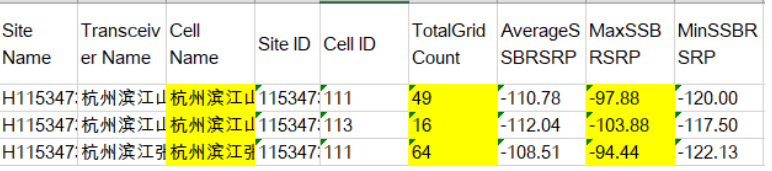
Ø 某小区在DT数据中有但工参中没有:工参数据存在缺失,需要根据报告中的“Cells with DT but without EP”sheet中的数据,将工参补全;
![]()
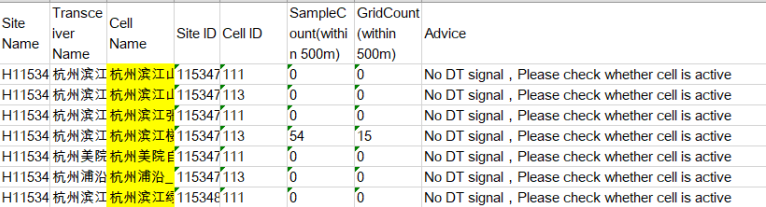
Ø 某小区在工参中有但DT数据中没有:需确根据报告中的“Cells with EP but without DT”sheet中的数据,核查小区是否未激活或出现故障;
![]()
Ø 某室内小区出现在DT数据中:需根据报告中的“Indoor Cells with DT Data”sheet中的数据,核查室分小区外泄,对于外泄较为严重小区,推动客户进行整改;
![]()
Ø NR路测覆盖率:当统计出的路测覆盖率已到达到优化目标值时,不建议继续做SSB覆盖优化。
1.3. 优化频点设置
完成数据导入和优化区域设置后,点击Next进入参数设置。
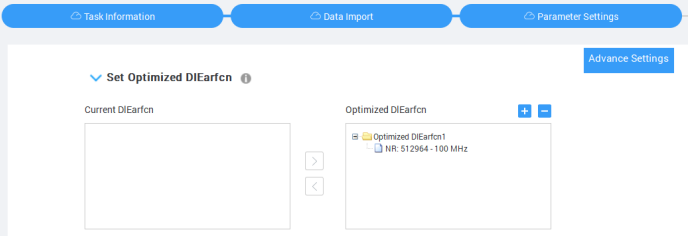
首先需要设置需要优化的频点对象,ACP会根据导入的数据自动生成频点列表(Current DlEarfcn),用户可根据需要设置待优化频点(Optimized DLEarfcn),ACP仅对Optimized DLEarfcn进行优化。
1.4.优化参数设置
RF优化参数选择界面支持Optimization 和Manual两种模式,选择Optimization 模式时,ACP根据设定的参数进行覆盖寻优并输出优化建议;选择Manual模式时,ACP仅根据给定的优化建议进行覆盖预测,不进行寻优。
1.4.1. Optimization 模式
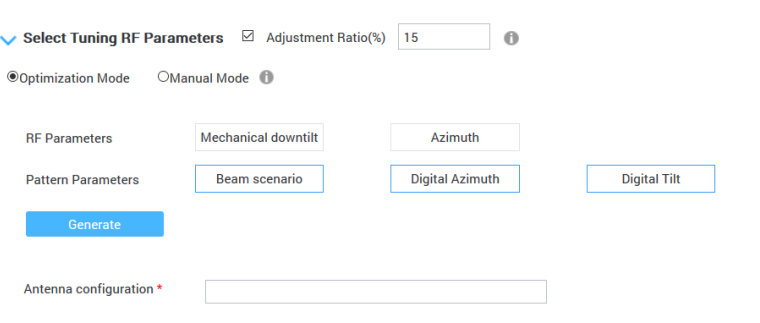
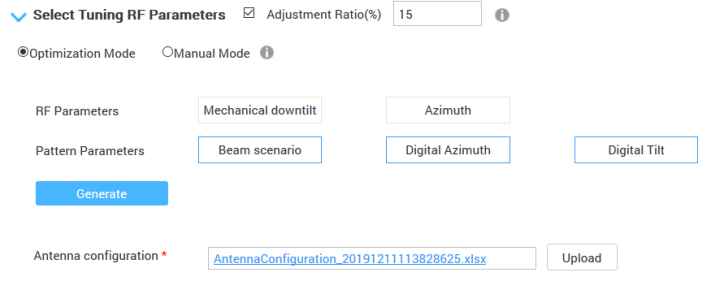
当前版本支持机械倾角、方位角、电子下倾角、波束场景、数字方位角和数字倾角6个参数,根据实际需要点击选择允许ACP调整的RF和Pattern参数。仅工参存在8T8R的小区时ACP界面才显示电子下倾角。当需要限制调整区域内小区的最大调整比例时,可勾选Adjustment Ratio并设置百分比。
![]()
在选择机械倾角、方位角、电子下倾角、数字方位角和数字倾角参数时,界面上会出现弹框,可在此设置对应参数调整的约束条件,包括调整类型、最大值、最小值和步长。其中调整类型包括Relative和Absolute,Relative是指相对当前取值的允许调整范围,Absolute是指参数的绝对调整范围。
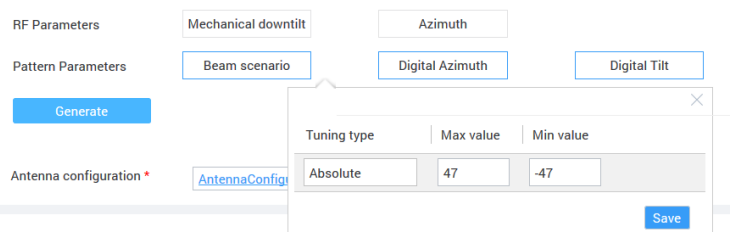
![]()
在选择Beam Scenario参数时,弹出框会出现超链接,可点击跳转至Advanced Setting 的 Beam Scenario Groups页签。

![]()
1.4.1.1. 波束场景组配置
在Beam Scenario Groups配置中,ACP会根据工参中的天线型号自动创建波束场景组,允许用户添加、删除、复制和编辑波束场景组,并在AntennaConfiguration表中为每个小区指定不同的波束场景组,以差异化的控制每个小区的波束场景寻优范围。
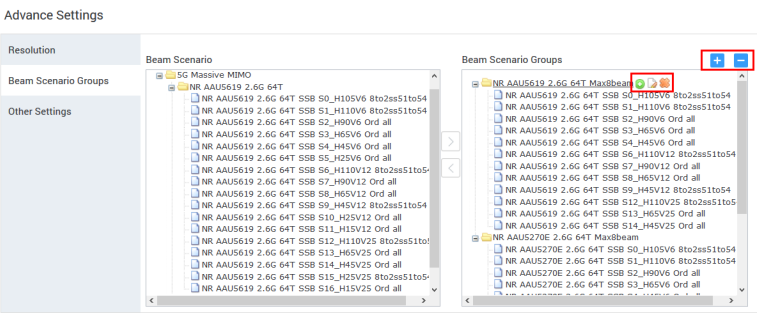
![]()
需要注意的是,如果工参存在天线型号相同但是如下参数不同的小区,会导致相同波束场景的小区的SSB波束数量不同,对小区实际的覆盖存在影响。此时,ACP会为同一款天线自动创建多个波束场景组,如:NR AAU5619 2.6G 64T Max8beam、NR AAU5619 2.6G 64T Max7beam、NR AAU5619 2.6G 64T Max8beam Dense、NR AAU5619 2.6G 64T Max7beam Dense。
1) 时隙配比或时隙结构不同,如同时存在时隙配比4:1(最大7波束)和8:2(最大8波束);
2) 波束加密开关配置不同,如有的小区打开波束加密(固定7波束或8波束),有的未打开(小于7波束或8波束)。
ACP不允许将时隙配比、时隙结构、或者波束加密开关不同的波束场景放在同一个波束场景组中,以避免出现逻辑性错误。
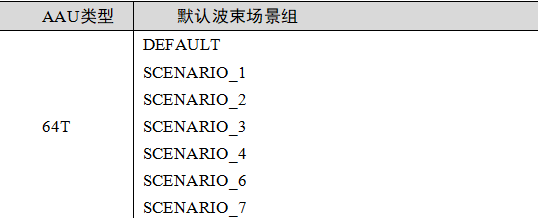
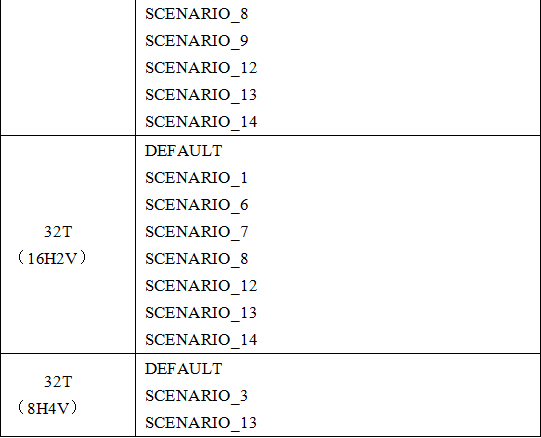
基于DT数据进行覆盖优化时,为避免对道路周边覆盖产生负面影响,ACP默认将水平波宽为25°和15°的波束场景从Beam Scenario Groups中去掉。针对64T和32T,默认生成的波束场景组配置如下:
1.4.1.2. 天线配置表设置
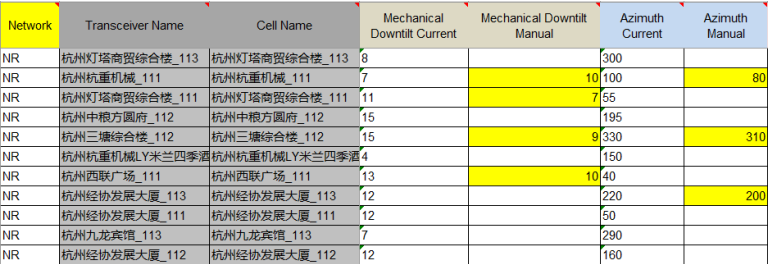
完成优化参数选择和设置后,点击Generate按钮,生成AntennaConfiguration文件,可用于设置小区级的RF和Pattern参数调整范围。用户可以根据需要打开该文件对单小区RF的Pattern参数进行编辑,然后重新上传。
![]()
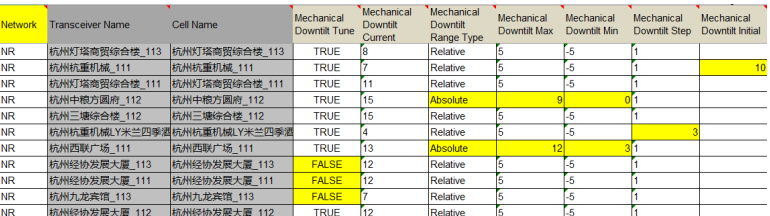
Ø 针对机械倾角、方位角、数字方位角和数字倾角:
AntennaConfiguration表中可以调整的参数包括:Tune(是否调整)、Type(相对调整or绝对调整)、Max(最大值)、Min(最小值)、Step(调整步长)、Initial(初始值)。
以机械倾角参数为例,当工具界面勾选机械倾角后,AntennaConfiguration表中默认生成的参数如下:所有小区Tune均为TURE(即允许调整),Type、Max、Min和Step取值与工具界面一致,Initial为空。
· 当某个小区的机械倾角不可调或禁止调整时,可将Mechanical Downtilt Tune列取值设为FALSE;
· 当某个小区的机械倾角可调范围受限时,可将Mechanical Downtilt Range Type列设置Absolute,并设置Mechanical Downtilt Max和Mechanical Downtilt Min取值范围;
· 当优化人员希望某个小区的机械倾角以更大或更小的步长进行调整时,可修改Mechanical Downtilt Step取值;
· 当优化人员希望将某个小区的机械倾角调整为某个值时,可在Mechanical Downtilt Initial列填入该值,ACP将会把该值作为初始的机械倾角调整建议。
需要注意的是,所有参数Initial列的取值不能超出小区对应天线型号所支持的调整范围,否则工具将不允许修改后的AntennaConfiguration表导入。
![]()
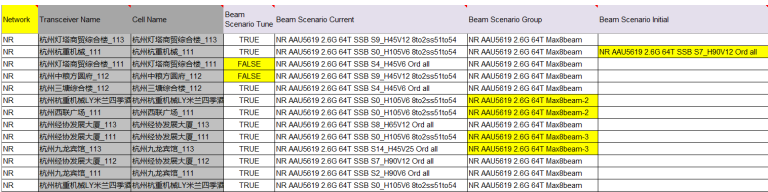
Ø 针对波束场景:
当工具界面勾选波束场景后,AntennaConfiguration表中默认生成的参数如下:小区的波束场景在默认的波束场景组中时 Beam Scenario Tune取值均为TURE, Beam Scenario Groups取值为ACP自动生成的天线组名称、Beam Scenario Initial为空。
· 当某个小区的波束场景禁止调整时,可将Beam Scenario Tune列的取值设为FALSE;
· 当某个小区需要变更寻优的波束场景范围时,可将Beam Scenario Group列的取值设为在波束场景组配置中设置好的波束场景组;
· 当优化人员希望将某个小区的波束场景调整为某个值时,可在Beam Scenario Initial列填入该值,ACP将会把该值作为初始的波束场景调整建议。
需要注意的是,Initial列的取值不能超出小区对应天线型号所支持的波束场景范围,否则工具将不允许修改后的AntennaConfiguration表导入。波束场景的取值填写方式比较复杂,如需修改请联系开发支持。
1.4.2.Manual模式
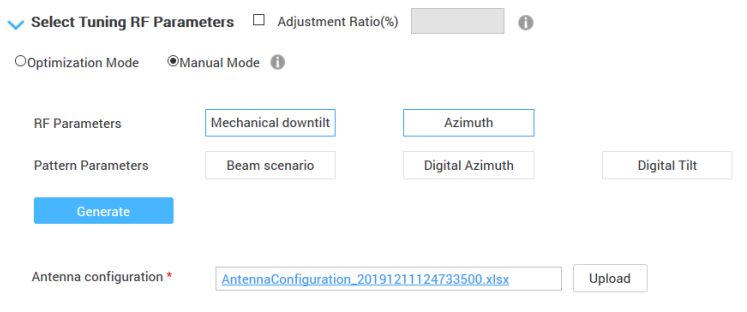
![]()
Manual模式一般有两种用途:
1、在通过ACP Optimization模式生成优化建议后,人为对部分小区的优化建议进行调整,然后使用Maunal模式进行优化结果预测;
2、人工输出Massive MIMO覆盖优化建议后,使用Manual模式进行优化结果预测。
在使用Manual模式时,需先点击Generate生成AntennaConfiguration文件,然后找到需要调整的小区,对需要调整的RF或Pattern参数的Manual列进行修改。
以机械倾角/范围就为例,在Manual列填写需调整小区的优化建议即可,未调整的小区无需填写。
需要注意的是,所有参数Manual列的取值不能超出小区对应天线型号所支持的调整范围,否则工具将不允许修改后的AntennaConfiguration表导入。波束场景的取值填写方式比较复杂,如需修改请联系开发支持。
![]()
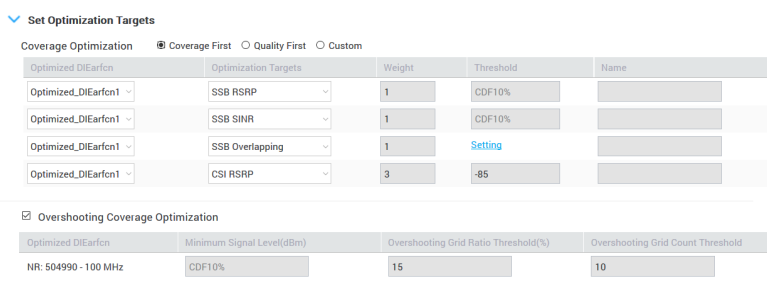
1.5. 优化目标设置
ACP支持同时设置4个覆盖优化目标,包括SSB RSRP、SSB SINR、SSB Overlapping和CSI RSRP,同时可支持越区覆盖(Overshooting Coverage)优化。仅当任务创建页面
勾选Include CSI Coverage Opt功能时,才会呈现CSI RSRP优化目标,否则不会呈现。
优化目标用于问题区域的识别,以及ACP迭代寻优过程中对预期增益的计算。
![]()
优化目标支持覆盖优先、质量优先和自定义三种方式,选择覆盖优先和质量优先时参数不可修改,选择自定义时参数可修改。三种方式对应的优化目标默认值如下:
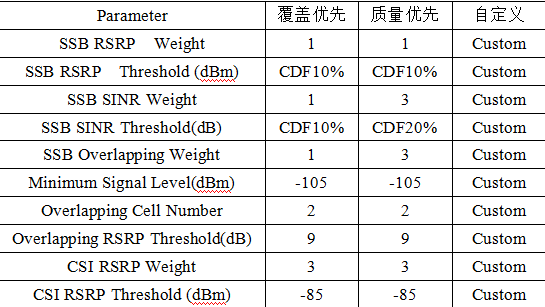
SSB RSRP:当某个栅格测量的SSB RSRP< SSB RSRP Threshold时,判断为SSB弱覆盖栅格。当SSB RSRP Threshold设置为CDF10%时,ACP按照DT数据Servring SS-RSRP列的数值从小到大排序,取10%位置对应的RSRP值作为SSB RSRP Threshold的实际值;
SSB SINR:当某个栅格测量的SSB SINR< SSB SINR Threshold时,判断为SINR质差栅格;
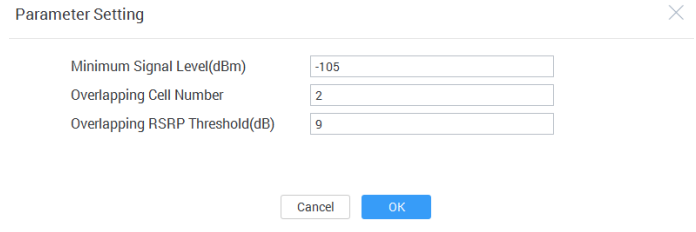
SSB Overlapping:以下图设置的参数为例当某个栅格同时满足如下条件时,则判断为重叠覆盖栅格:
1) 至少存在2个邻区与服务小区的RSRP差值低于9dB;
2) 满足条件1的邻区和服务小区RSRP≥-105dBm。
![]()
CSI RSRP:当某个栅格测量的CSI RSRP< CSI RSRP Threshold时,判断为CSI弱覆盖栅格。
ACP支持设置优化目标的权重,当对应目标的Weight取值越高时,ACP寻优过程中进行Fitness评估所占的比重越高。对SSB覆盖电平要求较高时,可提高SSB RSRP对应权值;对SSB SINR要求较高时,可提高SSB SINR对应权值。对于同一个优化区域,我们可以尝试设置不同的权重组合,观察ACP寻优后的增益,并选择最优的一组作为优化建议。
当勾选越区覆盖功能时,ACP会优先进行越区小区识别,收缩小区覆盖距离以解决越区覆盖。ACP默认配置的越区覆盖优化目标如下:
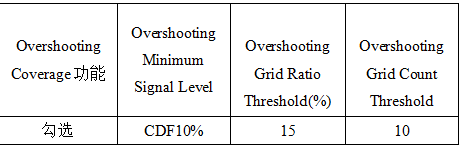
越区覆盖小区的判断方式如下:
1) 若A小区主覆盖的A1栅格与A小区的距离超过1.2倍平均站间距,且SSB RSRP大于Overshooting Minimum Signal Level设定值(默认取CDF10%,计算方法与SSB RSRP Threshold相同),则A1栅格被判断为越区栅格;
2) 若A小区下的越区栅格数大于Overshooting Grid Count Threshold (默认10),且越区栅格数占A小区主覆盖的所有栅格数比例超过Overshooting Grid Ratio Threshold (默认15%),则A小区被判断为越区小区,否则为非越区小区。
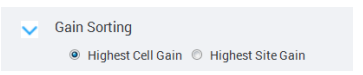
1.6. 增益排序设置
增益排序支持两种方式:按照小区增益排序;按照站点增益排序。
![]()
当仅选择调整Pattern参数时,由于不涉及上站实施成本低,建议选择按照小区增益排序(Highest Cell Gain);
当选择调整RF参数时,对于上站成本较高的局点,建议选择按照站点增益排序(Hightest Site Gain);对于上站成本较高的局点,建议选择按照小区增益排序(Highest Cell Gain)。
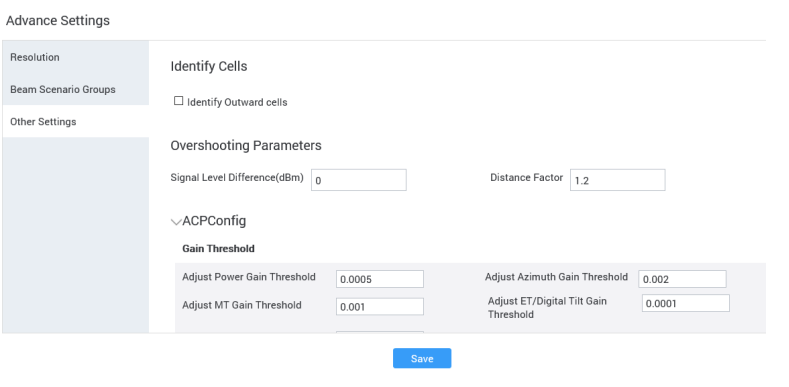
1.7.高级参数设置
高级参数提供了波束场景组设置、越区门限、增益门限、最小调整门限、5G相关参数的设置功能。一般情况下,用户无需进行高级参数设置,使用默认的参数值即可,如有特殊需求可联系开发人员支持。
![]()
Identity Cells参数:
Ø Identity Outward Cells:外打小区识别,勾选后ACP会识别未朝向优化区域内的小区并限制不做调整
Overshooting参数:
Ø Signal Level Difference(dBm):越区电平差门限
Ø Distance Factor:越区距离因子门限
ACPConfig参数:
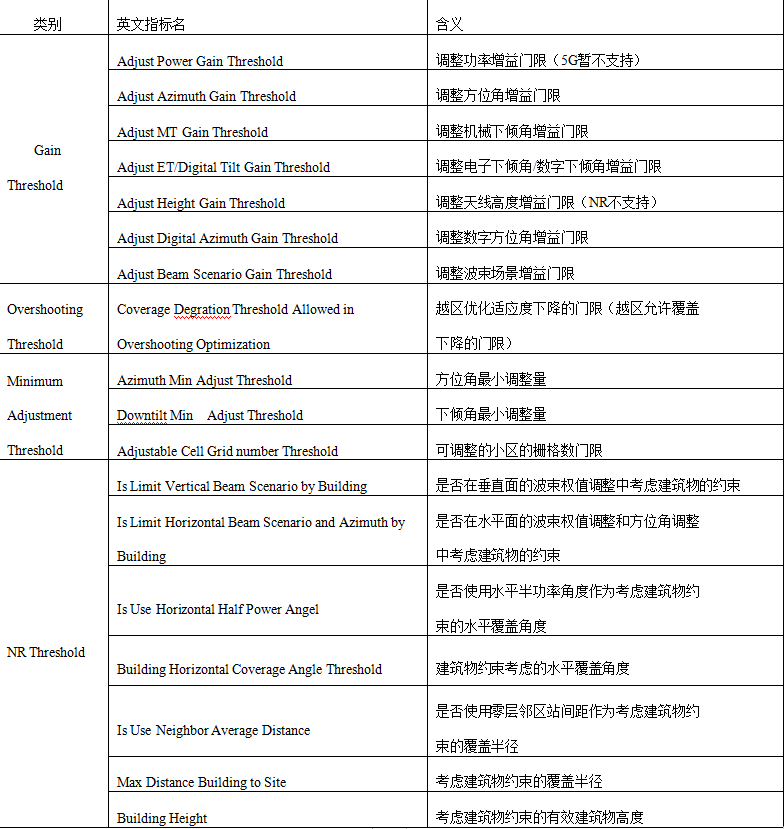
说明:
1、越区的电平差门限和距离因子影响越区的优化;
2、增益门限只有调整相应参数带来的增益大于门限才会调整该参数。
1.8. 优化结果分析
点击RUN按钮后,ACP任务开始执行。待任务处理完成后,用户会收到系统推送的邮件通知。如果任务允许失败,请联系开发人员定位。
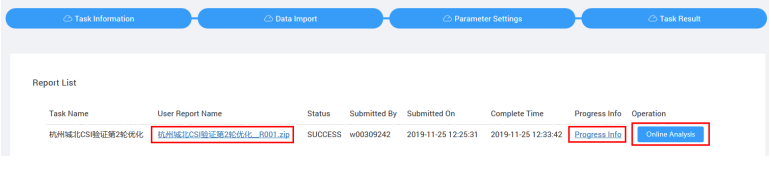
![]()
点击生成的zip包,可下载Excel格式的优化报告。
点击Progress Info,可查看任务运行过程。
点击Online Analysis按钮,跳转至GIS页面进行在线分析。
1.8.1. 指标汇总分析
![]()
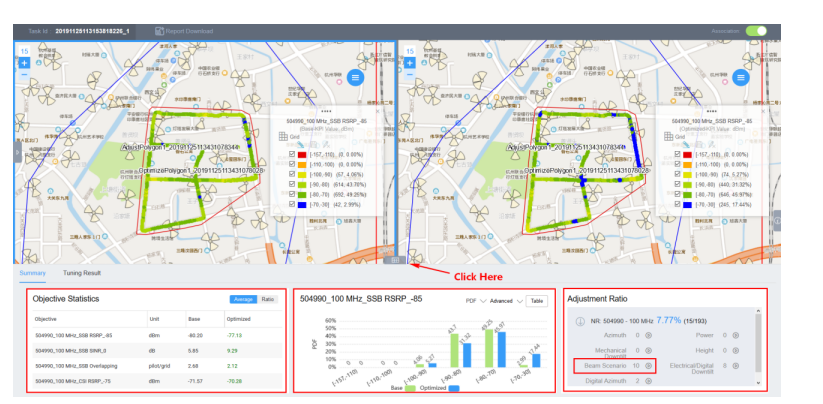
点击GIS页面底部的
![]()
标签,可展开Summary页签,共呈现三组统计表。
Objective Statistics表呈现各优化目标的当前值和预测值,包括均值和比例统计;
PDF/CDF表呈现各优化目标的当前值和预测值的区间分布,默认呈现SSB RSRP指标,可双击Objective Statistics表中的指标切换到SSB SINR等其他指标;
Adjustment Ratio表呈现整体调整比例和各RF或Pattern参数的调整比例,点击某个参数后面的
![]()
按钮可查看该参数的具体调整情况。以波束场景为例:
![]()
1.8.2. 调整建议分析
Tuning Result页签可以查看ACP优化方案和每个小区的增益详情。
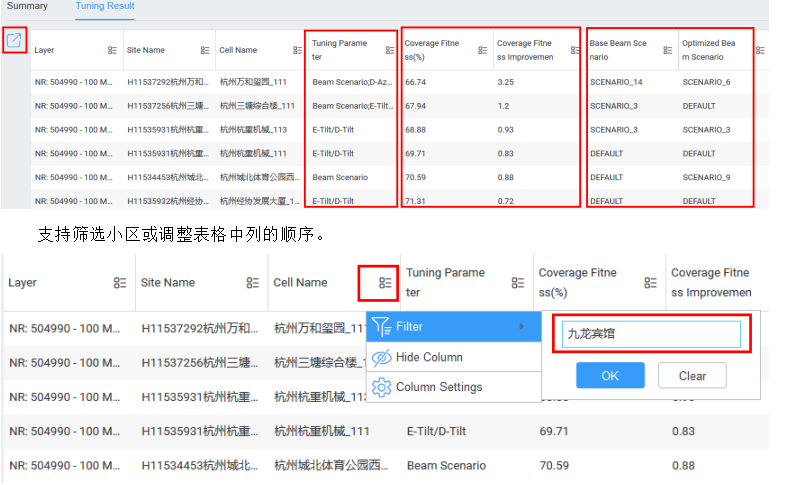
![]()
支持筛选小区或调整表格中列的顺序。
![]()
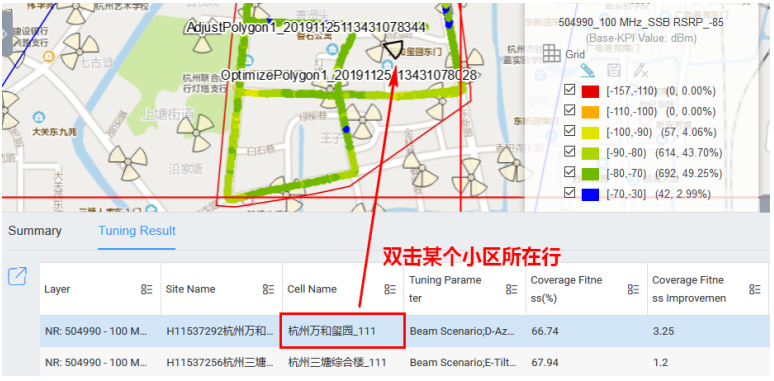
双击某个小区所在的行,GIS页面将会自动调整到该小区所在位置并选中该小区。
![]()
想要领取免费网优基础学习资料
获得免费网优内推岗位
可加入网优交流QQ群
374637347
这篇关于网优干货:ACP交付详解版(2)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





